
#
Edición de mosaico
#
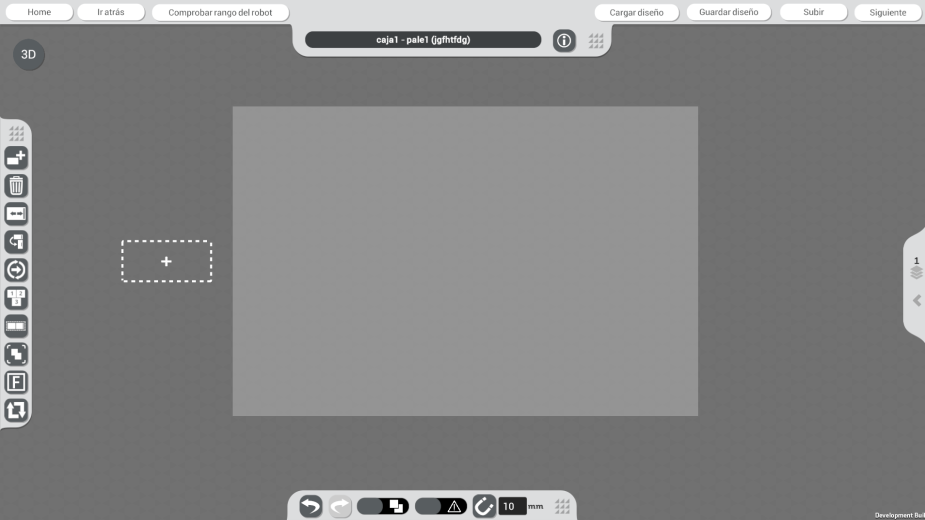
Interfaz de edición de mosaico
La creación de mosaicos con la configuración seleccionada se realiza en una interfaz simple y versátil, tal y como se muestra en la siguiente imagen.
#
 Botón Add product (Añadir producto)
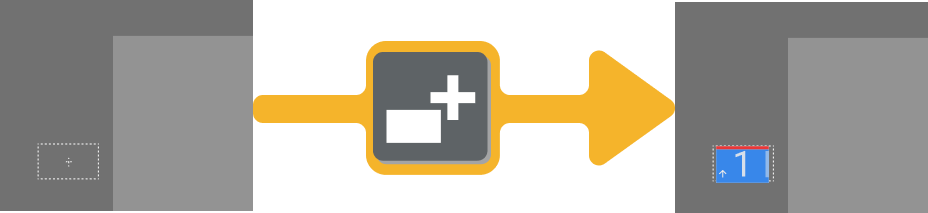
Botón Add product (Añadir producto)
Añade un nuevo producto para que el usuario lo emplace en la representación del palé según el mosaico definido previamente. Cada pulsación añadirá un elemento más, siguiendo el orden numérico de la capa.
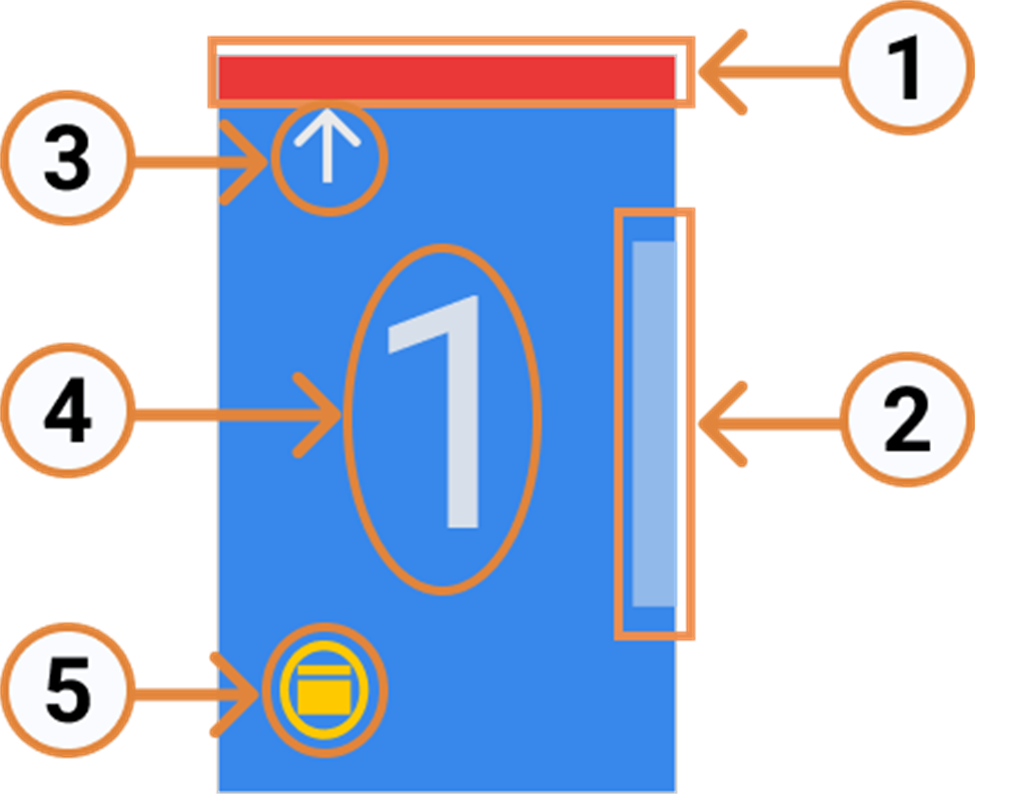
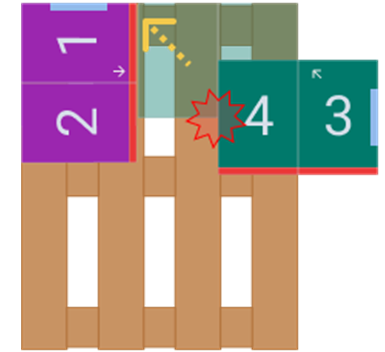
Los productos añadidos muestran las siguientes referencias visuales:
| 1. Finger: Representa la posición fija de la mano. 2. Stopper: Indicador del lateral en contacto con el límite de detención en el pickup. 3. Direction: Dirección de aproximación final. 4. Number: Muestra el orden de entrada en el pickup. 5. Inverted: Muestra que la caja usa las coordenadas de pick invertido. |
 |
A continuación puedes ver lo fácil que es añadir un producto en el software Wepall🤖.
#
Herramientas de posicionamiento
Para un ajuste detallado de los productos a paletizar en el mosaico, wepall dispone de una serie de herramientas que permitirán ubicar con precisión los elementos en el mosaico.
#
 Desplazar manualmente un elemento
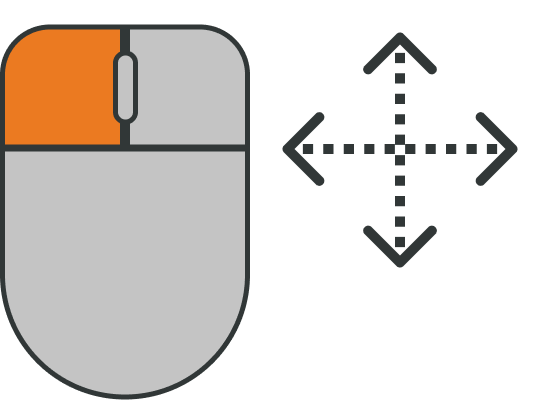
Desplazar manualmente un elemento
Hacer clic en el elemento o grupo a mover y sin soltar, desplazar hasta la posición deseada.
#
 Rotar elemento
Rotar elemento
Seleccionar el elemento a girar y hacer clic en el icono de rotación y desplazar hasta la inclinación deseada. Por defecto se realizará a saltos de 45 grados.

En caso de necesitar posiciones intermedias, mantener presionado el botón Control del teclado, para que los saltos sean grado a grado.
#
 Move selection (Desplazamiento preciso)
Move selection (Desplazamiento preciso)
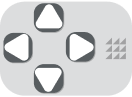
Seleccionar el elemento a mover y pulsar las flechas de dirección, o en su defecto con los cursores del teclado, para desplazarlo en los saltos fijados en el campo de ajuste de la función de aproximación y con saltos en milímetros.
#
 Botón Delete (Eliminar)
Botón Delete (Eliminar)
La función del botón Delete es eliminar los productos seleccionados. Reordenando la numeración de los elementos restantes en pantalla.

Si quieres dejar tu palé sin un producto que colocar, échale un ojo al siguiente video. Verás que fácil es empezar de cero.
#
 Botón Group/Ungroup (Agrupar/ Desagrupar)
Botón Group/Ungroup (Agrupar/ Desagrupar)
Este comando permite agrupar varios productos, de forma que se acumulen en el pickup, sean tomados a la vez por la garra y depositados sobre el palé en el mismo movimiento.


Los grupos creados pueden ser manipulados y desplazados igual que con los productos individuales.
Aumenta tu producción🥇
Esta función permite aumentar la productividad y alargar la vida útil del sistema, al minimizar el número de movimientos a realizar por el robot. Aunque tiene sus contrapartidas, ya que, al aumentar el número de unidades tomadas, aumenta el peso a desplazar y por tanto la inercia del conjunto. También es imprescindible comprobar que, tanto el robot es capaz de desplazar la carga hasta la distancia requerida, como que la mano puede tomar los productos en condiciones de seguridad, evitando que puedan ser lanzados durante los desplazamientos a altas velocidades.
Como recomendación general y con un producto en condiciones óptimas (compacto, con una distribución de carga y peso uniforme, etc...), la mano debe tomar como mínimo 2/3 del producto, sobresaliendo este como máximo 1/3. Estas indicaciones son orientativas, verificar los parámetros técnicos del producto, de la mano y del robot.
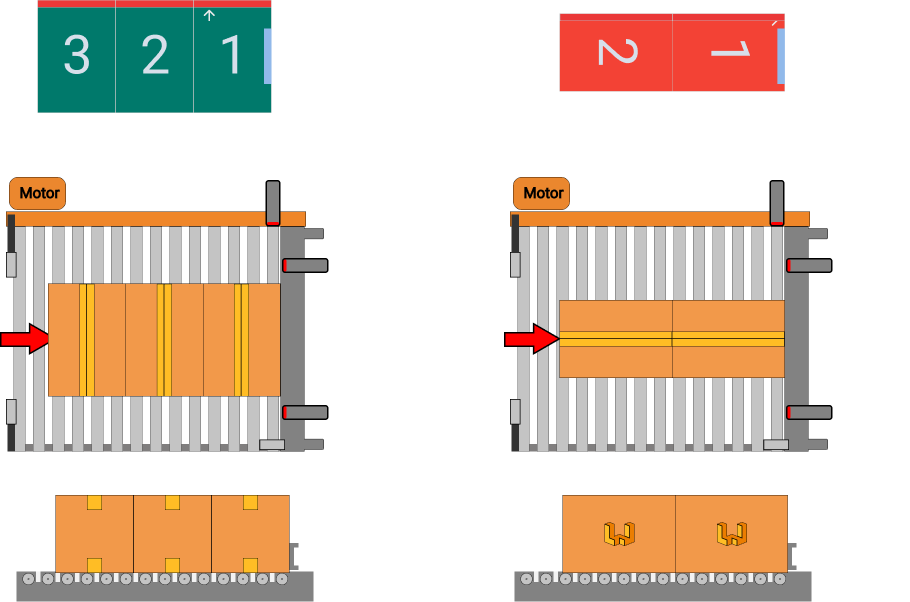
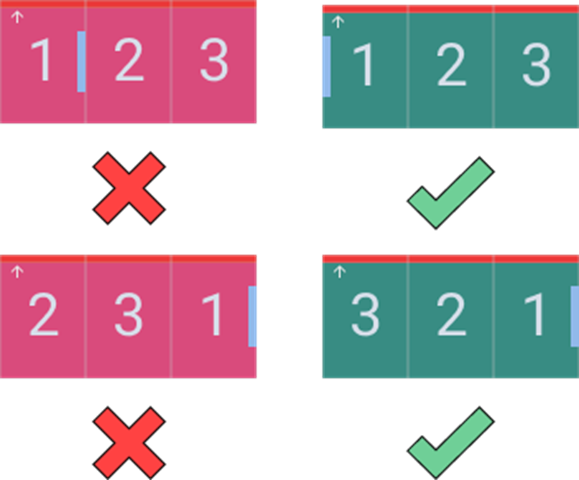
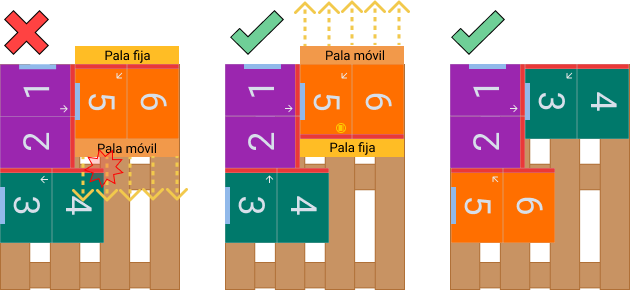
El orden de los elementos a agrupar deberá ser el orden de entrada en el pickup de los productos a agrupar, quedando la marca de Stopper en el extremo del producto que primero entra en el pickup.
#
Ejemplos
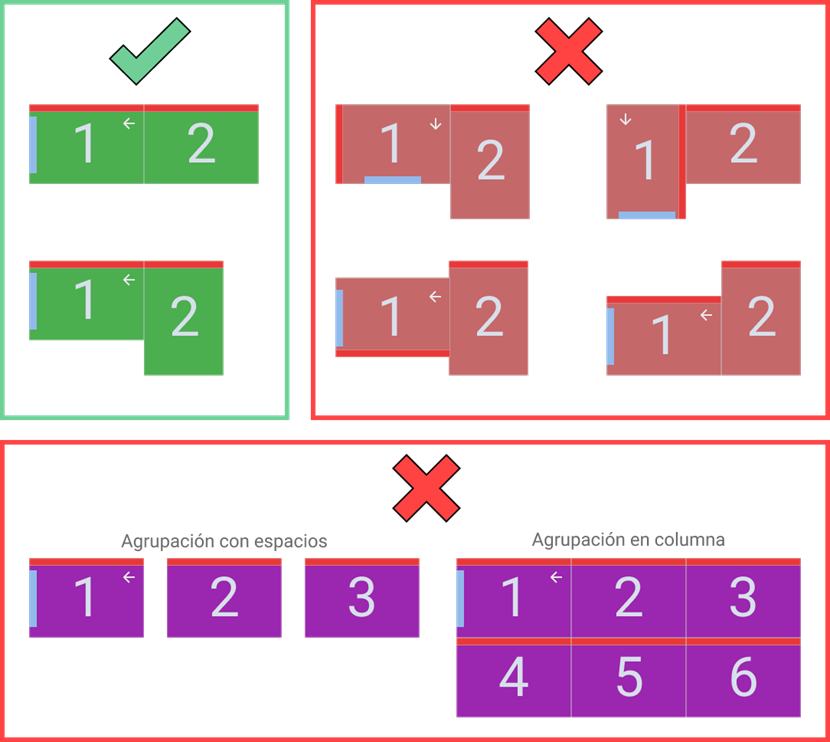
A continuación vamos a ver situaciones correctas e incorrectas para poder entender mejor como funciona la opción de agrupar.
Para deshacer un grupo creado previamente, convirtiéndolos de una tomada múltiple a individuales.
- Seleccionar el grupo.
- Hacer click en el boton Ungroup.
#
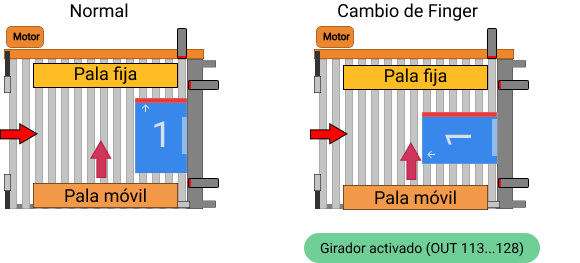
 Boton sets/Unsets (Rotar/Desrotar) (Botón Finger)
Boton sets/Unsets (Rotar/Desrotar) (Botón Finger)
Esta función, cambia el punto de contacto fijo de la garra.
Solo estará presente físicamente con las garras de tipo Fork tool y Async tool, al ser las únicas que disponen de parte fija en contacto con el producto. En el resto se considera su presencia de forma virtual. Puede cambiarse su posición pulsando Finger.
Con esta función activa, durante el ciclo de ejecución, el robot le enviará al PLC mediante el canal de comunicación, un grupo de 16 bits con los datos de giro de cada producto de dicho movimiento. Cada bit corresponderá a un producto, siendo el bit 0 el primer producto y el bit 15 el producto número 16 de la agrupación.
Un valor de 'False / 0' indica que el producto no está girado, y un valor de 'True / 1' indicará que el producto deberá girar 90º. El PLC será el encargado de controlar los elementos electromecánicos existentes en el pickup para girar los productos según su orden de entrada.
#
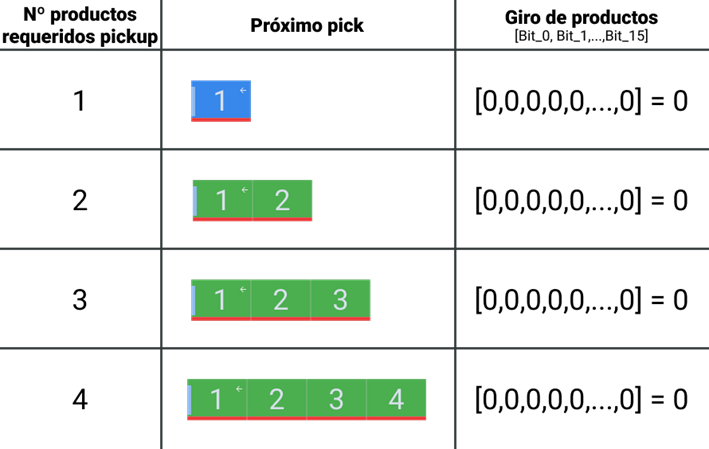
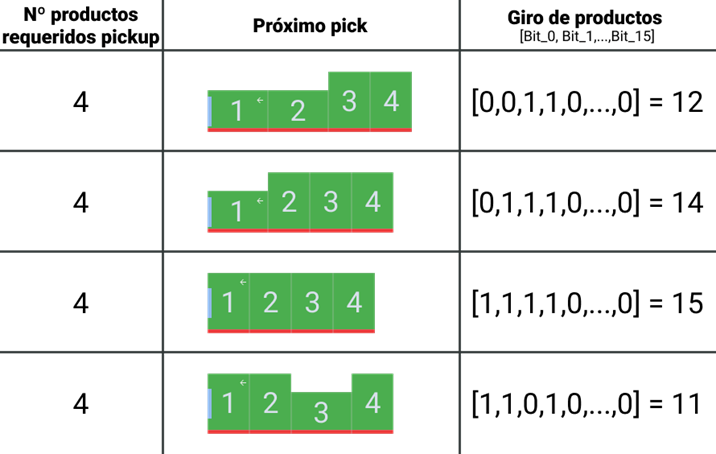
Señales del Robot al Plc (Group-Finger)
Diferentes casos para entender como debe ser la interacción entre los productos solicitados por el robot y como debe gestionar el plc la entrada de productos.
#
 Botón Stopper
Botón Stopper
Esta función permite indicarle al robot, que use para el movimiento indicado, las coordenadas de pick invertido. En condiciones ideales, corresponderán a la garra girada 180º con respecto a las coordenadas de pick normales. También podrá ser empleada cuando se necesite alguna posición especial para tomar el producto por su morfología, así como para pickup con diseños especiales.
Esta opción estará disponible en todos los tipos de garra, excepto en las de tipo Fork.
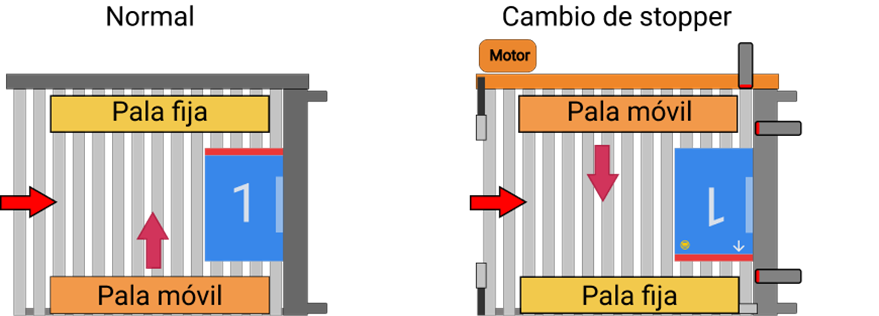
Este factor ha de ser considerado a la hora de diseñar un mosaico, ya que el comportamiento de las distintas partes móviles podría generar colisiones.
El ejemplo siguiente representa el comportamiento de una mano tipo Async tool.
#
 Botón Direction
Botón Direction
La dirección de aproximación corresponderá al ángulo en el que el robot se aproximará al punto de dejada del producto.
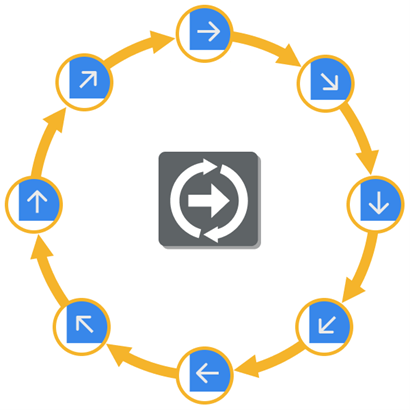
Para modificar la dirección seleccionar el elemento y pulsar el botón Direction. La dirección irá girando con cada pulsación.
Este parámetro resulta crucial para una correcta paletización, ya que una elección errónea puede generar una colisión con los productos ya paletizados.
#
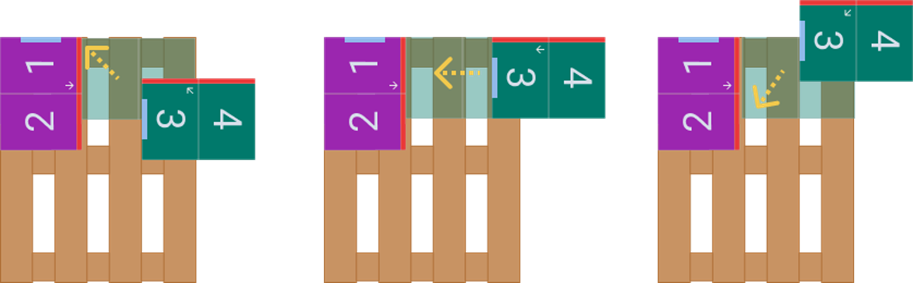
Ejemplo 1
El grupo formado por el producto 3 y 4 realiza una aproximación correcta, sin posibilidad de colisión con los productos ya paletizados.
#
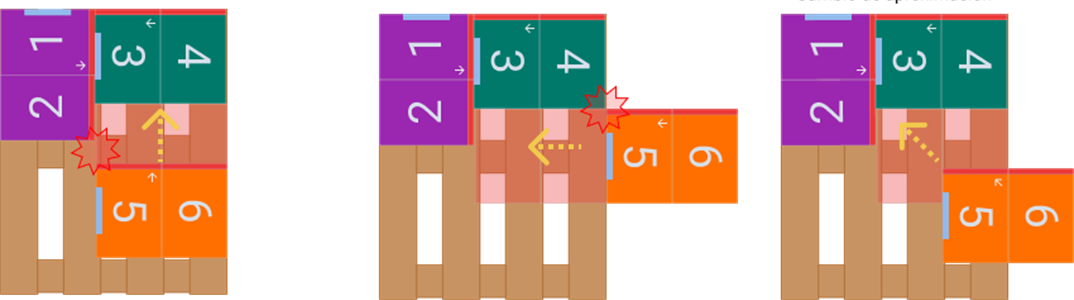
Ejemplo 2
En el siguiente caso se muestra una situación en la que se puede originar una colisión, al realizar la aproximación final, un lateral y la esquina del producto 5, pueden entrar en contacto con los del producto 2 o del 4.
#
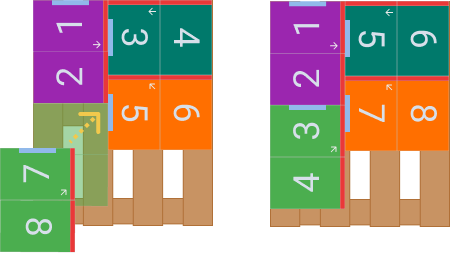
Ejemplo 3
Como recomendación general, considerar la marca de Stopper como punto de referencia a la hora de realizar el mosaico, ya que se trata de un punto fijo y conocido, de forma que la variación de tamaño que pueden presentar los productos o el tamaño de la garra pueden presentar problemas de colisión a la hora de realizar la aproximación.
La imagen siguiente muestra un caso en que la orientación de Stopper no es la adecuada, de forma que, si el producto o la garra presenta una mayor dimensión, colisionaría el producto 4 con el 1 y 2.
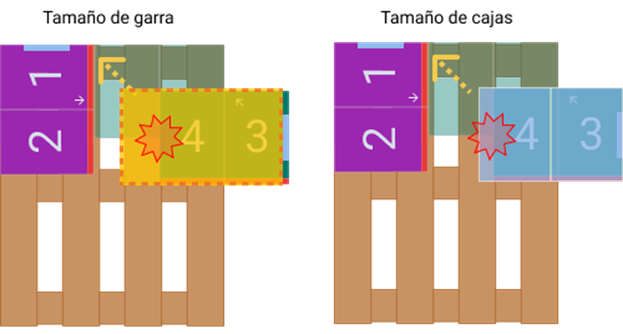
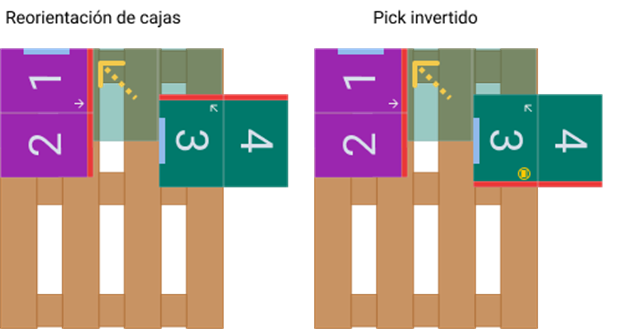
Posibles soluciones.
#
Ejemplo 4
El caso representado muestra una situación en la que se produciría una colisión al elegir erróneamente la dirección de aproximación. El producto 7 colisionaría con el 5 al descender sobre el palé.
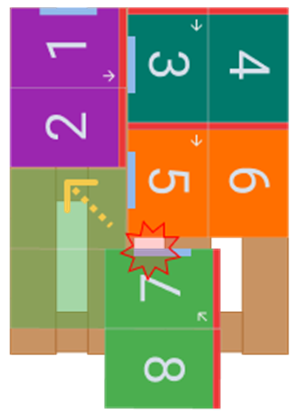
A continuación, se muestran dos posibles soluciones a este caso.
#
 Botón Reorder (Reordenar)
Botón Reorder (Reordenar)
La función del botón Reorder products number permite reorganizar numéricamente los productos que conformen un mosaico, sin tener que reorganizar manualmente los elementos.
Cuando se hace clic en el botón Reorder products number, la numeración de los elementos del mosaico cambia al valor 0.
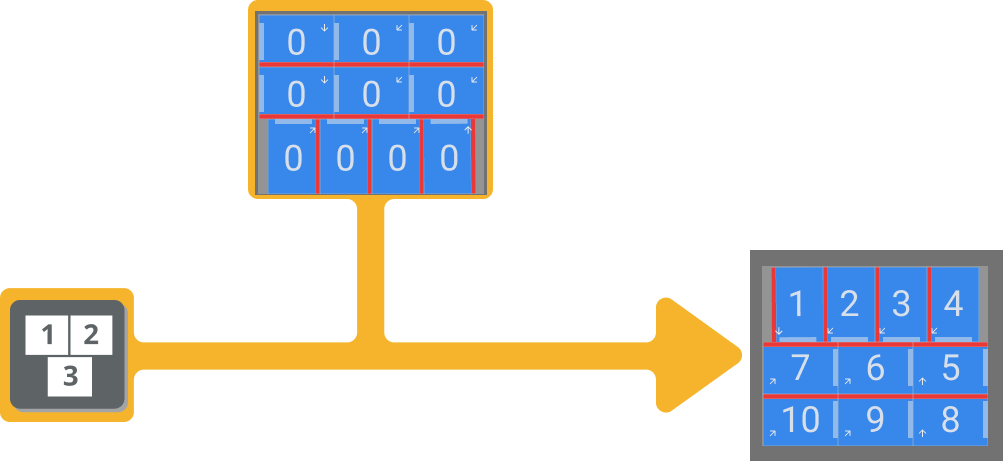
Al clickar en los elementos, le asignara un valor numérico de forma incremental. Una vez reorganizado el mosaico, hacer clic en Finalizar para aplicar los cambios.
#
 Botón Layer Fill (Autorelleno de capa)
Botón Layer Fill (Autorelleno de capa)
El botón Layer Fill completa el número de productos que geométricamente pueden contener el palé indicado, según las dimensiones de producto especificadas. Para ello ofrecerá varias opciones de posibles mosaicos.
Advertencia
Verificar el orden de entrada del mosaico y las direcciones de aproximación.
#
 Botón Center (Centrar producto seleccionado)
Botón Center (Centrar producto seleccionado)
Permite centrar geométricamente los elementos presentes con su distribución actual en el área de trabajo, sobre la superficie del palé mostrado en la interface.
#
 Botón Rotate layer (Rotar capa)
Botón Rotate layer (Rotar capa)
Esta función permite girar 180º el mosaico de la capa seleccionada de forma automática.
Advertencia
Verificar el orden de entrada del mosaico y las direcciones de aproximación.
#
Pasos para la creación de un mosaico
1. Siguiendo las indicaciones previas, confeccionar el mosaico a realizar por el robot. Los productos insertados en el mosaico pueden indicar que se encuentran en error, cambiando de color y poniéndose de color rojo. Las situaciones susceptibles de generar error son:
- Solapamiento de productos.
- Productos fuera de la superficie del pale.
- El producto no dispone de suficiente soporte por parte de los productos de la capa inferior.
cuando se insertan más de 64 productos en una capa, sale un mensaje avisando que la configuración actual el palé y producto provocará un valor de ciclos muy alto, lo que es muy ineficiente y en la mayoria de los casos puede afectar al rendimiento. ¿Quieres continuar igualmente?
El mosaico está limitado a un máximo de 512 ciclos por palé.
warning
Verificar el Mosaico resultante, así como las aperturas de la garra seleccionada, el orden de colocación de productos en el mosaico y las direcciones de aproximación.
#
 Guardado de mosaico existente
Guardado de mosaico existente
#
Pasos
- Para guardar el mosaico existente, para su posterior reutilización en otra receta, hacer clic en el icono Guardar diseño (Save Design).
- Seleccionar el fichero de mosaico deseado y hacer clic en Abrir.
#
 Carga de mosaico existente
Carga de mosaico existente
#
Pasos
- Para cargar un mosaico previamente existente, hacer clic en el icono Cargar diseño (Load Design).
- Seleccionar la carpeta de destino deseada y hacer clic en Guardar.
#
 Advertencia de errores en el diseño de mosaico
Advertencia de errores en el diseño de mosaico
Los productos insertados en el mosaico pueden indicar que se encuentran en error, cambiando de color y poniéndose de color rojo. Las situaciones susceptibles de generar error son:
- Solapamiento de productos.
- Productos fuera de la superficie del pale.
- El producto no dispone de suficiente soporte por parte de los productos de la capa inferior.
La notificación de error y aviso de diseño puede ser activado/ desactivado de la siguiente forma.
 Activado Activado |
 Desactivado Desactivado |
|---|---|
| En la posición indicada a continuación, los productos aparecen notificando el error. Siendo en el caso descrito por solapamiento. | En la posición indicada a continuación, los productos NO notificaran el error. |
#
 Visualización de mosaico de capa inferior
Visualización de mosaico de capa inferior
Para el diseño de un mosaico estable, es necesario que se vean los productos ubicados en la capa inferior, y garantizar que todos productos tienen un soporte suficiente en la capa inferior.
En el caso de que un producto no tenga el soporte suficiente en la capa inferior, se notificara que está en error, cambiando su color a rojo.
Para modificar las opciones de visualización, seguir los siguientes pasos. 🚶👣
 Activado Activado |
 Desactivado Desactivado |
|---|---|
| En la posición indicada a continuación, se visualizará el mosaico de la capa inmediatamente inferior. | En la posición indicada a continuación, se visualizará únicamente el mosaico de la capa actual. |
#
 Ajuste de función de aproximación
Ajuste de función de aproximación
Para un ajuste de precisión de un diseño en un mosaico, se requiere alinear correctamente todos los elementos. Para ello Wepall integra esta función para facilitar el diseño de los mosaicos.
Esto permite que cuando se aproxime un producto a los bordes del pale o a un producto ya posicionado, y las distancia sea inferior a la fijada, el producto se alineara automáticamente con el elemento.
 Activado Activado |
 Desactivado Desactivado |
|---|---|
| En la posición indicada a continuación, la función de aproximación estará activada, y la distancia indicada será la que determine el rango de aproximación. | En la posición indicada a continuación, la función de aproximación estará desactivada. Dependerá del usuario, la precisión de los mosaicos generados. |
#
 Información detallada del mosaico
Información detallada del mosaico
Pulsar en el icono de información.
En el menú desplegable, se podrá visualizar la información relativa al mosaico actual.
Para la descarga del informe relativo al mosaico, pulsar el icono de descarga de PDF. Y seleccionar la carpeta de destino.
#
 Previsualización 3D
Previsualización 3D
Pulsar en el icono
, para previsualizar la capa actual en 3D. En este modo, si se selecciona un producto, se podrá desplazar, modificando el mosaico.Pulsar en el icono visualización de capa
 , para previsualizar en 3D el mosaico completo en la etapa de desarrollo actual.
, para previsualizar en 3D el mosaico completo en la etapa de desarrollo actual.Pulsar en el icono de gravedad
 , se podrá comprobar el comportamiento estático del mosaico generado hasta ese momento.
, se podrá comprobar el comportamiento estático del mosaico generado hasta ese momento.
#
 Comprobación de rango del robot
Comprobación de rango del robot
Esta función permite comprobar si con la cofiguración establecida, el robot es capaz de alcanzar todas las posiciones de la secuencia del mosaico.
Algoritmo matemático 👨💻
Dicho algoritmo será realizado en los servidores wepall. 💻 ☁️ 🖥️ ☁️
warning
Si los nodos del proyecto no estan bien configurados, los resultados del estudio no serán válidos.
Para poder comprobar los rangos pulsar:
- En la pantalla de diseño de mosaico, pulsar el botón Check range of the robot.
- Si el robot es capaz de alcanzar todas las posiciones del mosaico, se muestra en el cuadro de dialogo adjunto confirmándolo.
#
Evaluación de errores
En caso de detectar un error en cualquiera de los puntos de la trayectoria, se muestra una tabla informativa donde se indicaran los siguientes datos.
- Layer. Capa donde se ha detectado el problema.
- Cycle. Dentro de los movimientos de esa capa, y teniendo en cuenta el orden de colocación, en cual de ellos se ha detectadel problema.
- Pose. Punto de la trayectoria de Wepall en conflicto.
Cuando se cierra el cuadro de dialogo automáticamente se ve la vista 3D, que muestra los elementos que presentan conflictos, mediante un parpadeo de color rojo.
En el caso de no configurar algunos de los parametros "criticos" (Coordenadas de Pick o Rear/Front...) en el proyecto, se muestra el mosaico de color rojo, todo el mosaico es erroneo.