
#
Flujo de trabajo
#
Selección de configuración para crear el mosaico
#
Pasos
Hacer clic en el botón Siguiente, ubicado en la parte superior derecha.
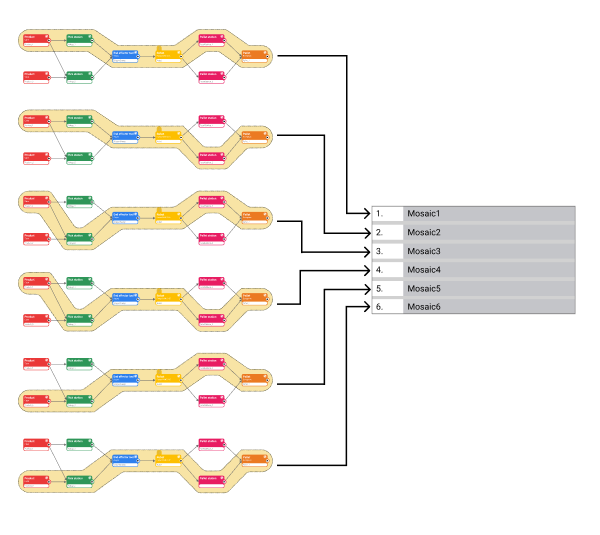
En el menú lateral, hacer clic sobre nuevo mosaico. Al poner el ratón sobre el nombre de una ruta se ilumina en color naranja la línea a la que corresponde.
Los distintos caminos en los que se edite el mosaico y se genere código, determinaran las recetas que se cargaran en el robot. Estas recetas, serán ejecutadas por el PLC en el ciclo de ejecución mediante el numero identificador de cada receta.
Las líneas que tienen un mosaico creado aparecen en color verde y dos botones uno para borrar el mosaico y otro para editarlo. Si se ha generado código al pasar el ratón sobre el mosaico aparece el nombre del programa asociado al mosaico en la parte inferior del menú lateral.
Cada camino representa una receta o programa de robot.
La eliminación de un nodo o de un nexo de unión entre nodos, supone que todas las recetas que usaban el elemento eliminado, quedaran inaccesibles y por lo tanto no se podrá editar su mosaico o generar código. A las recetas en esta situación, se les denomina recetas huérfanas.
#
Obtención de coordenadas
Las coordenadas a insertar en el software deben de cumplir los siguientes requisitos:
- Serán siempre en coordenadas World/Base del robot.
- No tendrá alterado el sistema de coordenadas World/Base del robot.
- No tendrá planos/marcos de referencia que alteren los datos obtenidos.
- El sistema de referencia de la tool (TCP) debe ser el de referencia, centrado en la brida del robot.
- La brida debe de estar paralela al sistema de coordenadas.
- El elemento de referencia empleado durante la toma de datos, debe de estar centrado en la brida del robot y perpendicular al sistema de referencia (carecer de inclinación).
- Los datos a tomar serán las coordenadas cartesianas X, Y, Z y Rz. Siendo esta última la rotación del eje integrado en la brida, y que estará paralelo al suelo.
- Por cuestiones de seguridad, el desplazamiento del robot será en el modo manual integrado en la controladora, y a velocidad reducida.
- Una vez posicionado el robot en la ubicación deseada, se obtendrá la coordenada en el apartado correspondiente de la interface de la controladora (Teach).