#
Preset Station – Interlayer Station
#
Description
This preset represents the station where the robot picks up interlayer sheets (usually cardboard), providing greater pallet stability.

#
Distance check method types
#
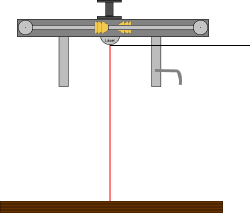
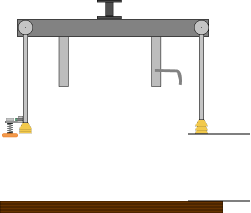
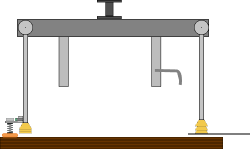
Static position
The station includes mechanical systems that keep the interlayers at a fixed position, allowing the robot to always pick them from the same location.
#
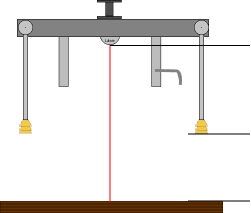
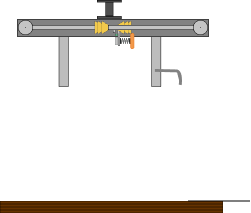
Distance sensor
In this case, the station does not include mechanical lifting systems. Instead, the gripper integrates a distance sensor that indicates to the PLC how far the cardboard is. This value is transmitted to the robot, which moves to the indicated position to pick the interlayer.
 |
 |
 |
|---|
#
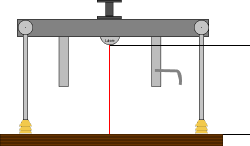
Contact sensor
In this case, the station has no mechanical lifting systems and no distance measurement sensor.
For this reason, the robot performs a slow downward movement until one of the following conditions is met:
 |
 |
|---|---|
 |
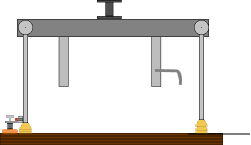 |
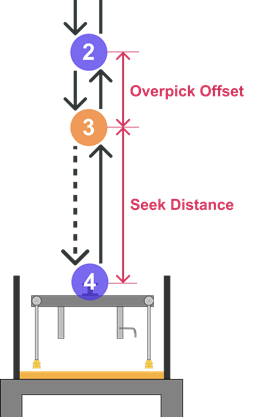
- The robot travels a maximum defined distance (Seek Distance) without finding interlayers, returning an error to the PLC.
- The presence of an interlayer is detected (vacuum, contact sensor, photoelectric sensor, distance sensor I/O, etc.), the interlayer is picked, and the cycle continues.
For more information, refer to the PLC interaction manual.
#
Variable assignment
Preset variables depend on the selected Interlayer Pick type.
#
Variables
#
Name
User-defined node name.
#
Distance check method
Selection of the integrated station type.
#
[X,Y,Z]
Coordinates of the interlayer station reference point (point 3).
#
[R]
Rotation coordinate Z of the interlayer station reference point (point 3).
Verify in the robot technical documentation which parameter corresponds to rotation around the Z axis. For more information, contact the Wepall technical department.
#
[W]
Rotation coordinate X of the interlayer station reference point (point 3). Only for collaborative robots.
Verify in the robot technical documentation which parameter corresponds to rotation around the X axis. For more information, contact the Wepall technical department.
#
[P]
Rotation coordinate Y of the interlayer station reference point (point 3). Only for collaborative robots.
Verify in the robot technical documentation which parameter corresponds to rotation around the Y axis. For more information, contact the Wepall technical department.
#
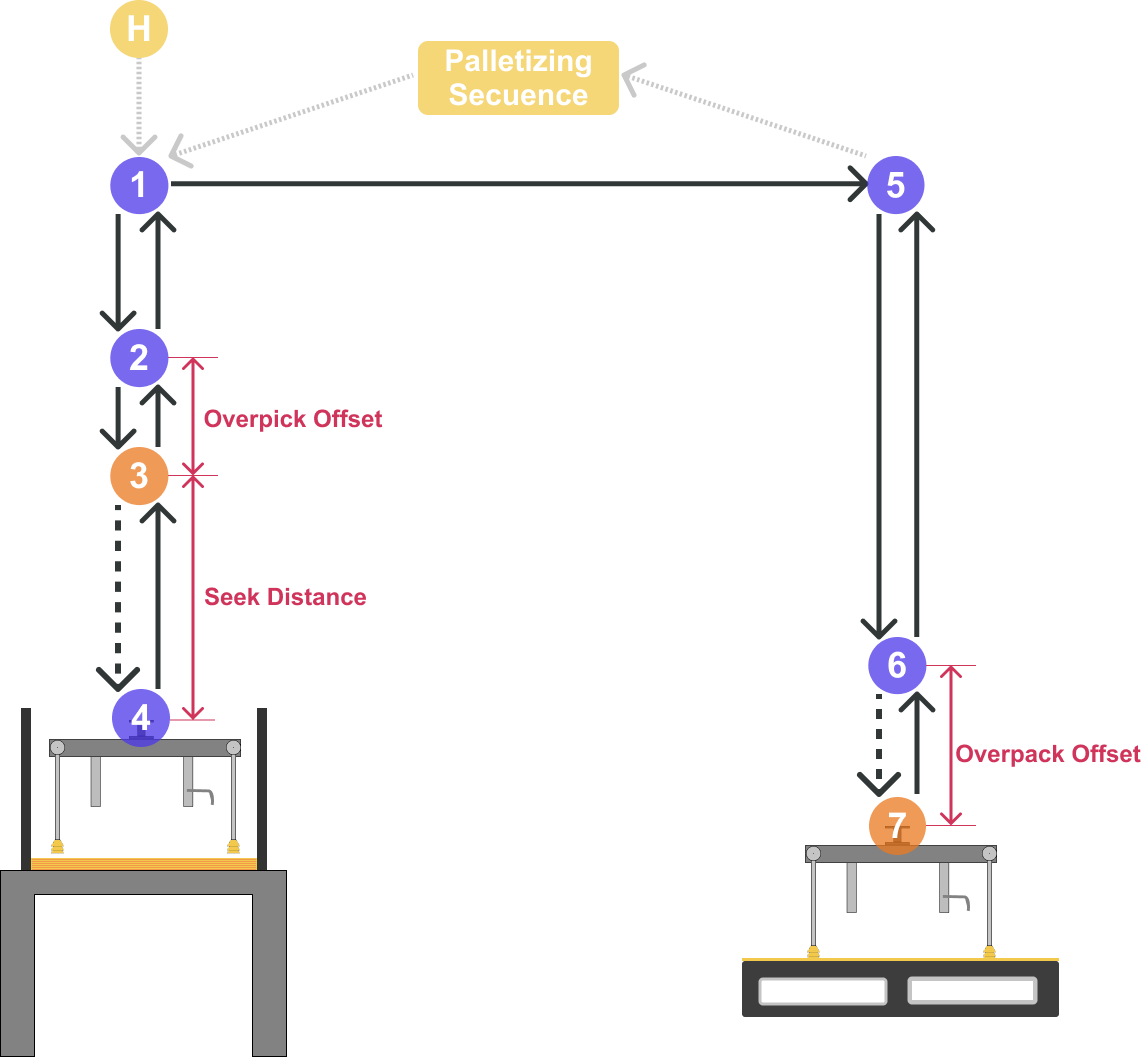
Overpick Offset
Distance offset above the interlayer station where the gripper positions itself to activate the integrated systems for picking interlayers, in millimeters.
#
Seek Distance
For contact sensor stations, this value defines the maximum distance traveled to find interlayers. If none are detected, the robot returns an error to the PLC, in millimeters.
#
Interlayer Pack variables
Once the Interlayer Pick preset is linked, these fields will appear in the Pallet Station preset.
#
Interlayer [X,Y,Z,R]
Coordinates of the interlayer placement point on the palletizing station (point 7).
#
Interlayer Overpack Offset
Height from which the interlayer placement approach is performed, in millimeters.
#
Lifter column variables in Interlayer Station
Once the lifter column is enabled in the Robot Preset, these fields will appear in the Interlayer Station Preset.
#
Lift Z
Lifter column position associated with the Pick coordinates of the Interlayer Station preset, in millimeters. Only for collaborative robots.
The Lift Z value of the Interlayer Station preset differs from the values used in the Pallet Station and Pick Station presets.
#
Pack Lift Z
Lifter column position associated with the Pack coordinates of the Interlayer Station preset, in millimeters. Only for collaborative robots.