#
Nodo Station - Pallet Pick Station
#
Descripción
Este nodo representa la estación donde el robot podrá tomar los pales, para posicionarlos sobre la estación de paletizado.

#
Tipos
#
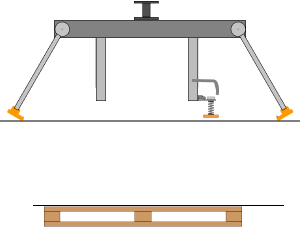
Posición estática (Static Position)
La estación dispone de sistemas mecánicos, que permite mantener el conjunto pales en una posición fija, permitiendo al robot tomarlos siempre desde la misma posición.
#
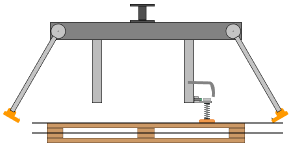
Sensor de distancia (Distance Sensor)
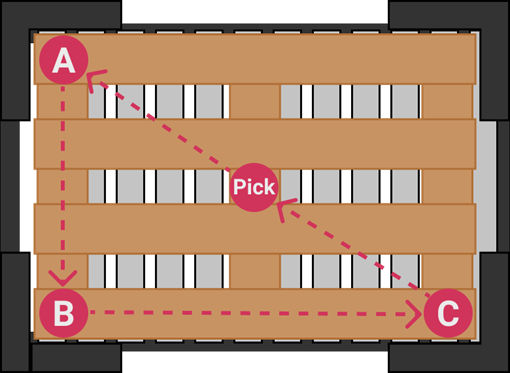
En este caso la estación carece de elementos que eleven los pales. Pero la garra integra un sensor de medición, que le indica al PLC la distancia a la que se encuentra el palé. Para una mayor fiabilidad de la medición, se medirá la distancia desde 3 puntos distintos.
Este valor es transmitido al Robot, y realizará un desplazamiento hasta la posición indicada para tomar el palé.
 |
 |
 |
|---|
#
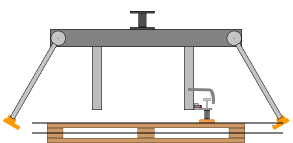
Sensor de contacto (Contact Sensor)
En este caso la estación carece de elementos que eleven los pales, y además también carece de un sensor de medición, que le indique al PLC la distancia a la que se encuentra el pale.
Por este motivo, el robot realizara un descenso a baja velocidad hasta que cumpla uno de estos supuestos:
 |
 |
|---|---|
 |
 |
Recorra una distancia máxima dada (Seek Distance) sin encontrar los pales, dando como respuesta un error al PLC.
Detecte la presencia de un palé (vacío, sensor de contacto, sensor fotoeléctrico, i/o de sensor de medición, etc..), lo tome y continúe el ciclo.
Consultar manual de integración con PLC para más información.
#
Conexión de nodo
#
Asignación de variables
Las variables de este nodo, serán modificadas en función del tipo de Pallet Pick seleccionada.
#
Variables
#
Nombre (Name)
Nombre dado por el usuario al nodo.
#
Tipo (Type)
Selección del tipo de estación integrada.
#
[X,Y,Z,R]
Punto de referencia de la estación de pales (punto 3).
#
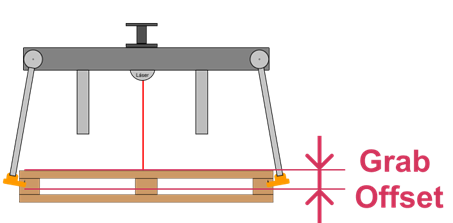
Distancia de agarre (Grab Offset)
En el caso de las estaciones por sensor de distancia, este valor indicará cuanto deberá de bajar la garra adicionalmente al valor indicado por el sensor de medición, para un correcto agarre del palé. Indicada en milímetros.
#
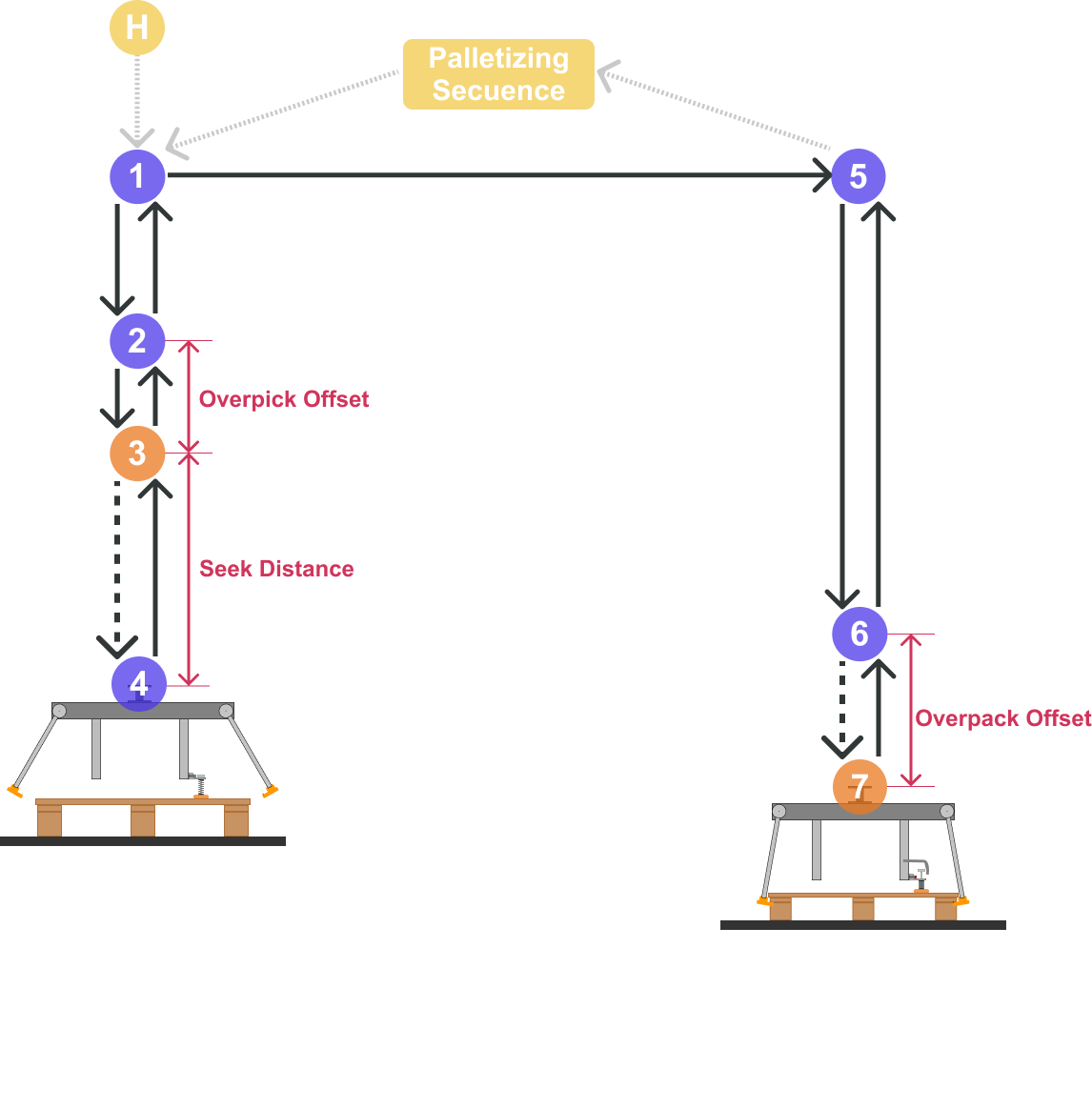
Offset sobre el pick (Overpick Offset)
Offset de distancia sobre la estación de pales, donde la garra se posicionará para activar los sistemas integrados para la toma de los pales. Indicada en milímetros.
#
Distancia de búsqueda (Seek distance)
En el caso de las estaciones por sensor de contacto, este valor indica la distancia máxima recorrida para encontrar los pales. En caso de no detectarlos, el robot dará como respuesta un error al PLC. Indicada en milímetros.
#
Punto [A,B,C]: [X,Y,R]
Coordenadas de medición configurables por el usuario, para una mayor fiabilidad de la medición de la distancia a la que se encuentra el palé.
Todos los puntos se encontrarán a la misma distancia del objetivo a medir.
#
Variables Pallet Pack
Una vez enlazado el nodo Pallet Pick, estos campos aparecerán en el nodo Pallet Station, en el apartado Pallet Pack.
#
[X,Y,Z,R]
Coordenada del punto de dejada del palé sobre la estación de paletizado (punto 7).
#
Distancia sobre el pack (Overpack Offset)
Es la altura desde la que se realiza la aproximación de la dejada. Indicada en milímetros.