#
Station Node - Interlayer Pick
#
Description
This node represents the station where the robot will be able to pick the layer pads (usually cardboard), giving the pallet more stability.
#
Types
#
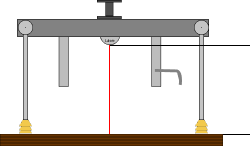
Static position (Static position)
The station is equipped with mechanical systems, which allows to keep the set of separators in a fixed position, allowing the robot to pick up the separators always from the same position.
#
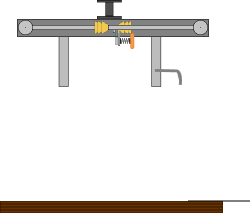
Distance sensor
In this case the station has no mechanical systems to lift the separators. But the gripper integrates a measuring sensor, which indicates to the PLC the distance to the cardboard. This value is transmitted to the Robot, and it will move to the indicated position to pick up the separator.
 |
 |
 |
|---|
#
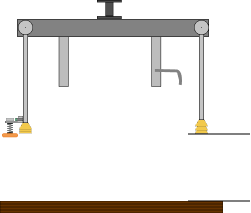
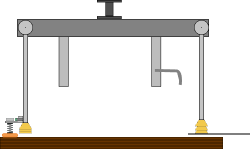
Contact sensor (Contact sensor)
In this case the station lacks mechanical systems to lift the separators, and also lacks the measuring sensor, which indicates to the PLC the distance to the carton.
For this reason...
the robot will perform a low speed descent until it meets one of the following assumptions:
 |
 |
|---|---|
 |
 |
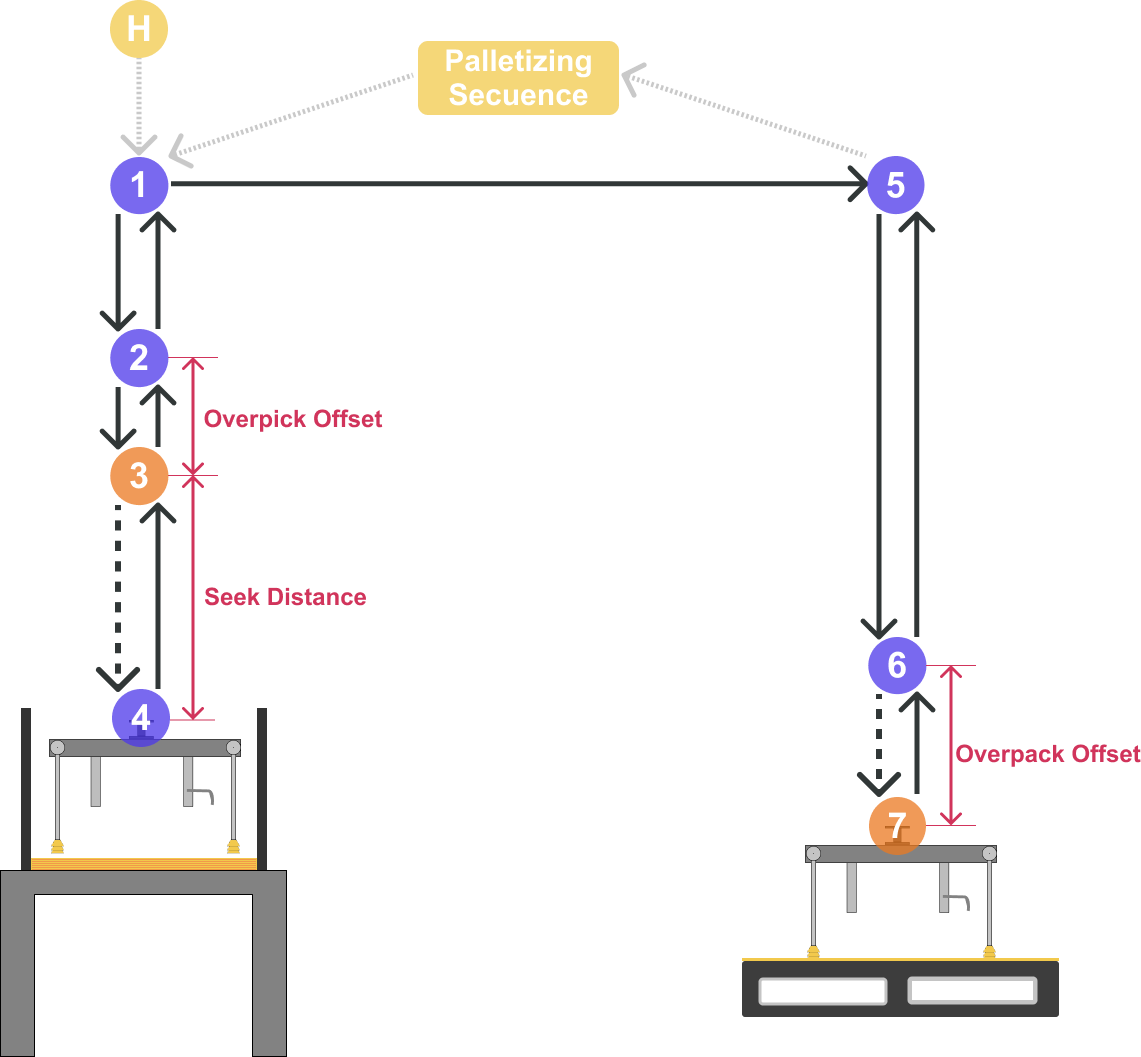
Travel a given maximum distance (Seek Distance) without encountering the separators, giving an error response to the PLC.
Detect the presence of a separator (vacuum, contact sensor, photoelectric sensor, i/o measurement sensor, etc.), pick it up and continue the cycle.
See PLC interaction manual for more information.
#
Node connection
#
Assignment of variables
The variables of this node will be modified according to the type of Interlayer Pick selected.
#
Variables
#
Name
Name given by the user to the node.
#
Detection type
Selection of the type of integrated station.
#
[X,Y,Z]
Coordinate of the reference point of the interlayer station (point 3).
#
[R]
Rotation Z coordinate value of the reference point of the interlayer station (point 3).
#
[W]
Rotation X coordinate value of the reference point of the interlayer station (point 3). Only for collaborative robots.
#
[P]
Rotation Y coordinate value of the reference point of the interlayer station (point 3). Only for collaborative robots.
#
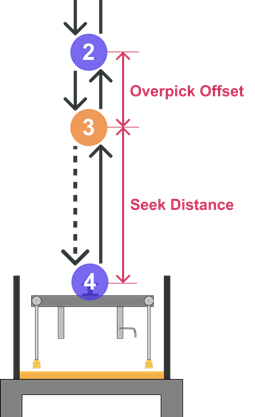
Overpick Offset
Offset of distance over the spreader station, where the grapple will be positioned to activate the integrated systems to pick up the spreaders. Indicated in millimeters.
#
Seek distance
In the case of the contact sensor station, this value indicates the maximum distance traveled to find the separators. In case of not detecting them, the robot will give an error response to the PLC. Indicated in millimeters.
#
Interlayer Pack Variables
Once the Interlayer Pick node is linked, these fields will appear in the Pallet Station node, in the Interlayer Pack section.
#
[X,Y,Z,R]
Coordinate of the drop point of the Interlayer on the pallet station Without pallet (point 7).
#
Overpack Offset
The height from which the drop-off approach is made. Indicated in millimeters.