#
Wepall supported claw types
The gripper morphologies compatible with the Wepall environment are as follows:
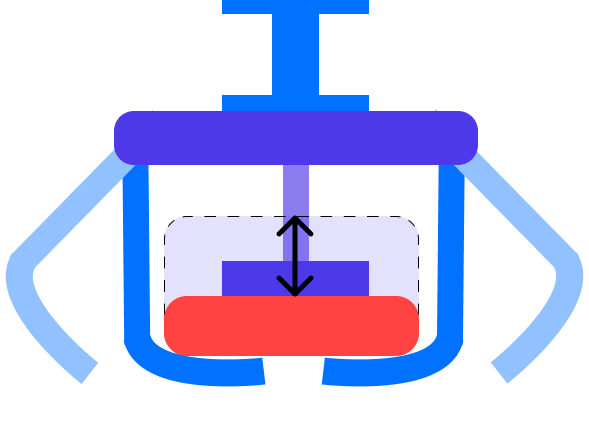
Gripper that is equipped with two blades that, by the pressure they exert laterally on the product, allow its manipulation.
In this particular case, one of the blades will be fixed and the other will be mobile, thus being in charge of exerting the force on the product.
As an auxiliary safety element, the use of a mechanical element that holds the products at the bottom is recommended. Generally associated to the mobile shovel.
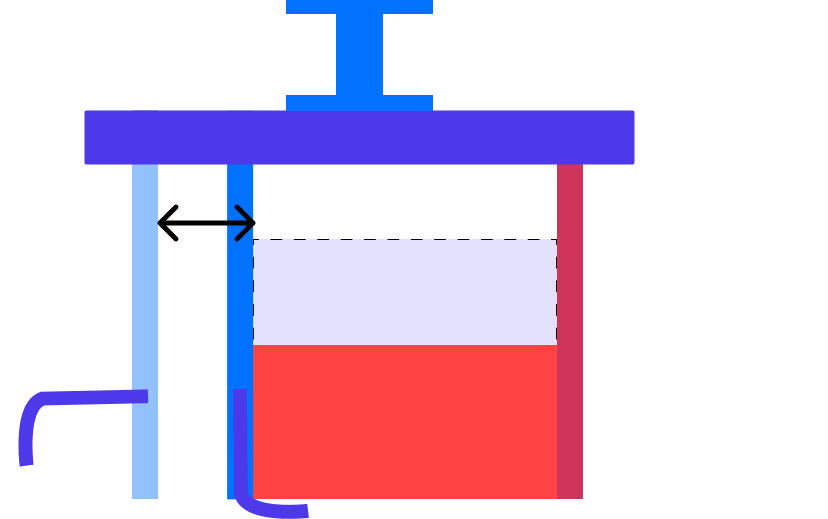
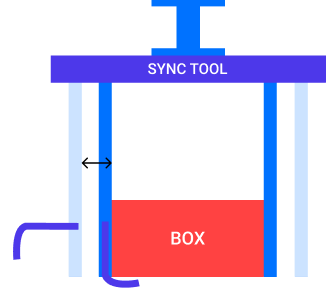
Gripper that is equipped with two blades that, due to the pressure they exert laterally on the product, allow its manipulation. In this particular case, both blades will be mobile, and their movement will be synchronized allowing the product to be centered with the center of the robot flange.
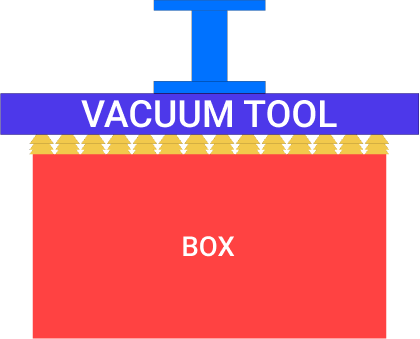
Gripper equipped with a vacuum system, which by means of the suction exerted can manipulate the product.
Grapple equipped with a fork on which the product will be deposited. Additionally equipped with a fixed blade on the opening side of the fork, on which the product will be aligned.
When picking up the product, the gripper accesses the pickup from the side, so that the fingers of the gripper move under the product. The pickup must be adapted for this purpose.
During the product drop-off movement on the pallet, as the fork moves to release the product, the fixed paddle keeps the product aligned and prevents it from shifting.
As an auxiliary safety element, the use of a mechanical element that presses the product against the fingers of the fork from the top is recommended. Generally this element will have 3 states, up (without exerting pressure on the product), down (exerting pressure on the product) and in an intermediate state in which it maintains its position, but does not exert pressure, which is useful during the product drop-off operation.

This type of gripper has a similar behavior to a fork gripper, but its movement system is by means of a servo motor. For more information, see the Servo gripper control section of this manual.
Specifically designed for bag handling. Equipped with movable elements that, when closing synchronously, wrap around the bag. So that the bag rests on them. In this case, the bag must be centered with the center of the robot flange.
As an auxiliary safety element, it is recommended to use a mechanical element that presses the bag against the gripper elements from the top. Generally this element will have 3 states, up (without exerting pressure on the product), down (exerting pressure on the product) and in an intermediate state in which it maintains its position, but does not exert pressure, which is useful during the product drop-off operation.
warning Warning
For any other morphology or variation, please consult Wepall's technical department.
warning Warning
The configuration of the nodes and the design of the mosaic is conditioned by the type of gripper selected, consult the node configuration and mosaic design manuals.