#
End Effector preset
#
Description
This preset defines the gripper installed on the robot, whose purpose is to handle the products to be palletized.
#
Types
#
Async Tool
#
Sync Tool
#
Vacuum Tool
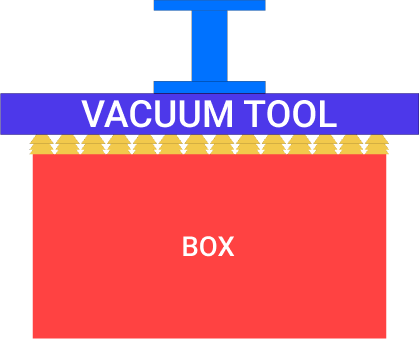
#
Fork Tool
#
Servo Fork Tool
#
Bag Tool
+info
Refer to the PLC interaction manual.
#
Variable assignment
Preset variables vary depending on the selected End Effector Tool type.
#
Variables
#
Name
Name assigned to the installed gripper.
#
Type
Defines the selected gripper type.
#
Zone Count
If the gripper has more than one zone (capable of holding and placing products separately within a single placement cycle), define how many zones it has.
Maximum number of zones is 8.
#
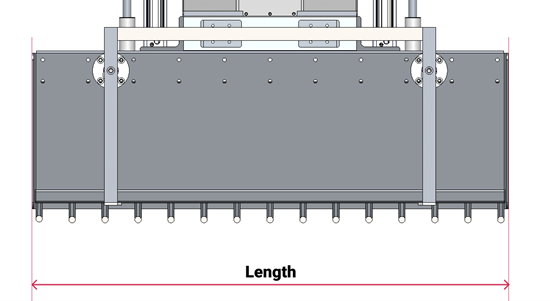
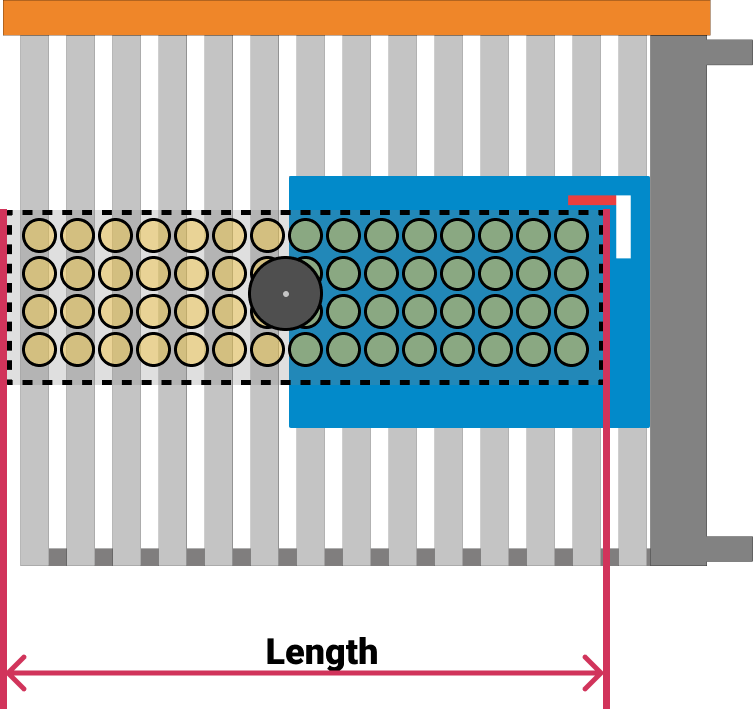
Length
Gripper length in millimeters.
If the gripper has multiple zones, enter the total length.
#
Length Zone N
Length of zone N along the total length, in millimeters.
One additional field is shown per defined zone.
|  |
|  |
|
#
Anchor Angle 📐⚓
Installation angle of the gripper relative to the robot flange, in degrees.
How do I measure this angle? 🤔
- Create a single-layer pattern.
- Measure the deviation of products relative to the pallet line.
#
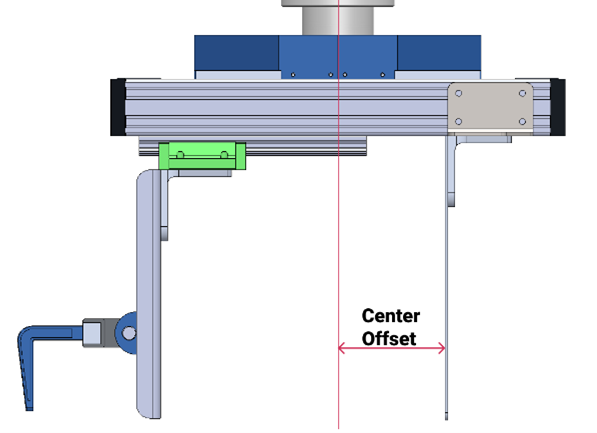
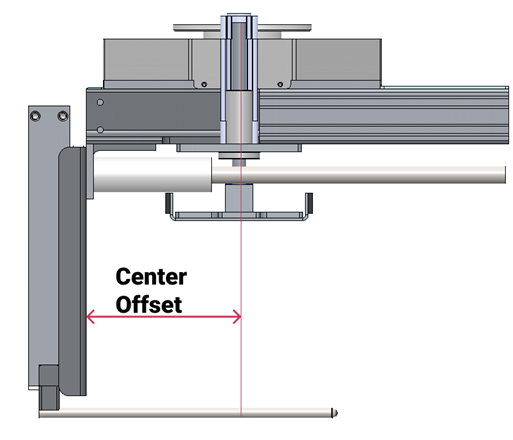
Center Offset 🎯
Distance between the robot flange center and the fixed surface of the gripper, in millimeters.
|  |
|  |
|
#
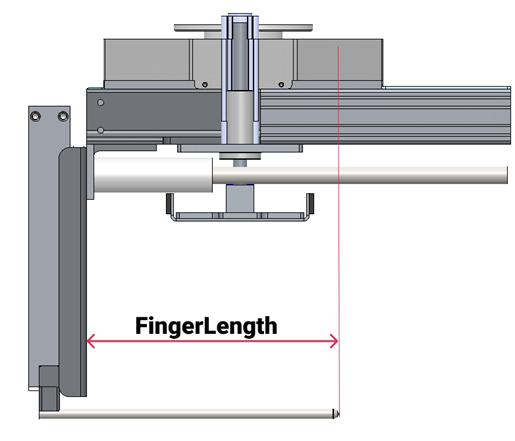
Finger Length 📏🖐️
Length of the gripper fingers, in millimeters.
#
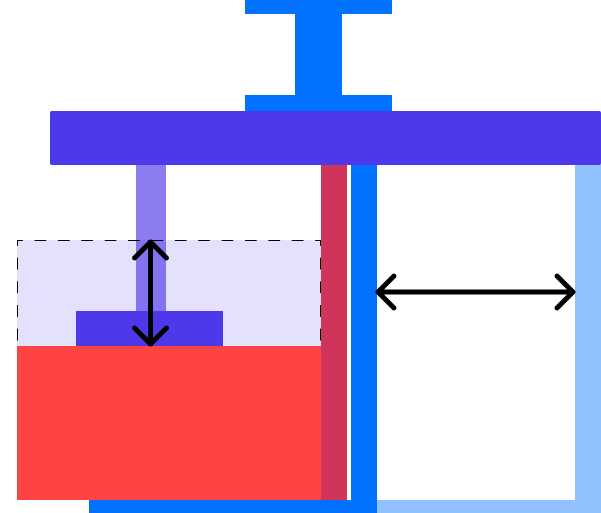
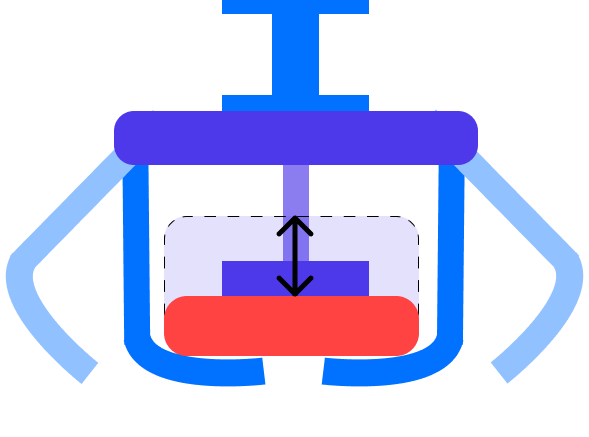
Max Stamper
Maximum stamper height, in millimeters.
#
Min Stamper
Minimum stamper height, in millimeters.