#
Nodo Robot
#
Descripción
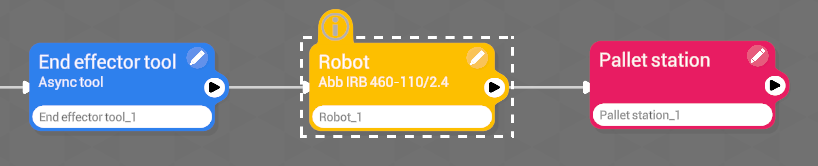
Este nodo referencia la marca y modelo de robot vinculado al proyecto.

#
Conexión de nodo
#
Marca y modelo
Este nodo estará asociado a una marca compatible y un modelo especifico de robot, presente en nuestra base de datos.
Una vez añadido y asignado el nodo robot al proyecto, no podrá ser eliminado el nodo, ni modificada la marca y modelo seleccionado.🚫🗑️
Para más información, consulte con el equipo técnico de Wepall.
#
Variables
#
Nombre(Name)
Nombre definido por el usuario para el robot.
#
Modelo(Model)
Modelo de robot a implementar en el proyecto.
#
Versión de la controladora (Controller version)
Versión de la controladora.
#
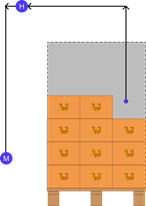
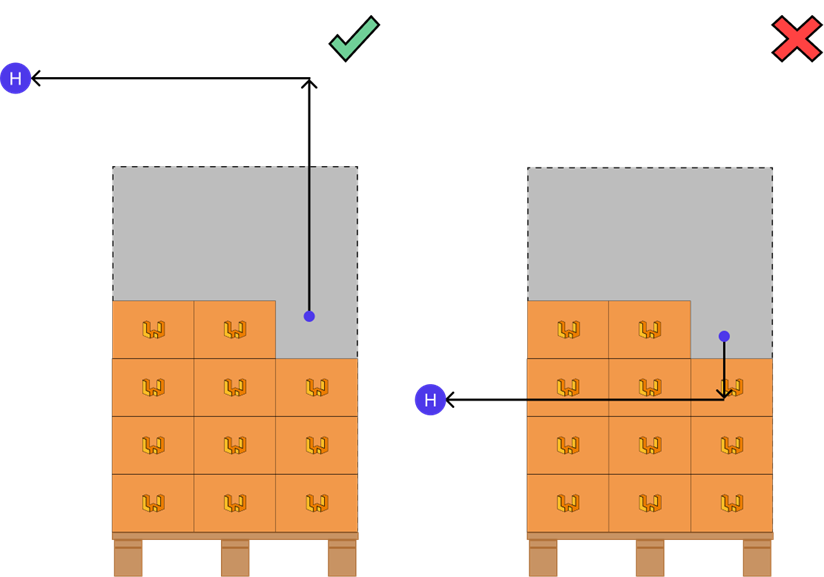
Home(X,Y,Z,R)
Coordenadas del punto Home donde el robot se ubicará en una posición segura donde no obstaculizará el funcionamiento de la instalación.
Para más información sobre su obtención, consultar el apartado de obtención de coordenadas de este manual.
#
Maintenance(X,Y,Z,R)
Coordenadas del punto de mantenimiento donde el robot se ubicará para las tareas de mantenimiento de la garra.
Para más información sobre su obtención, consultar el apartado de obtención de coordenadas de este manual.