#
Nodo End Effector
#
Descripción
Este nodo define la garra instalada en el robot, y cuyo objetivo será manipular los productos a paletizar.

#
Tipos
#
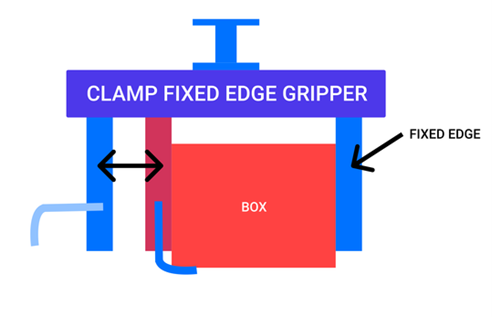
Herramienta asíncrona(Async Tool)
#
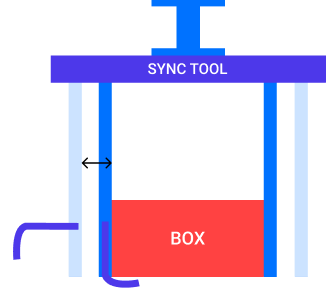
Herramienta síncrona(Sync Tool)
#
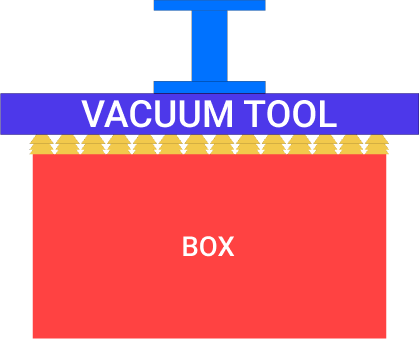
Herramienta de vacío(Vacuum Tool)
#
Herramienta de tenedor(Fork Tool)
#
Herramienta de servotenedor(Servo Fork Tool)
#
Herramienta de sacos(Bag Tool)
+info
Consultar manual de interacción con PLC.
#
Conexión de nodo
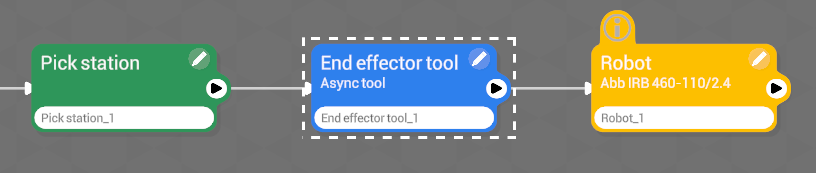
#
Asignación de variables
Las variables de este nodo, serán modificadas en función del tipo de End Effector Tool seleccionada.
#
Variables
#
Nombre(Name)
Nombre designado a la mano instalada.
#
Tipo(Type)
Define el tipo de garra seleccionada.
#
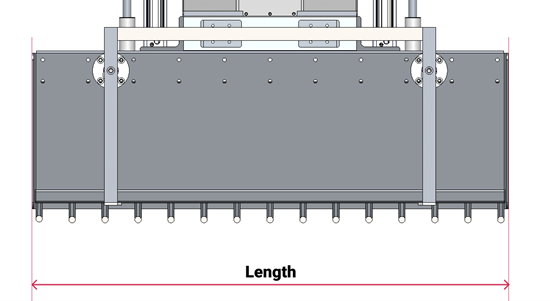
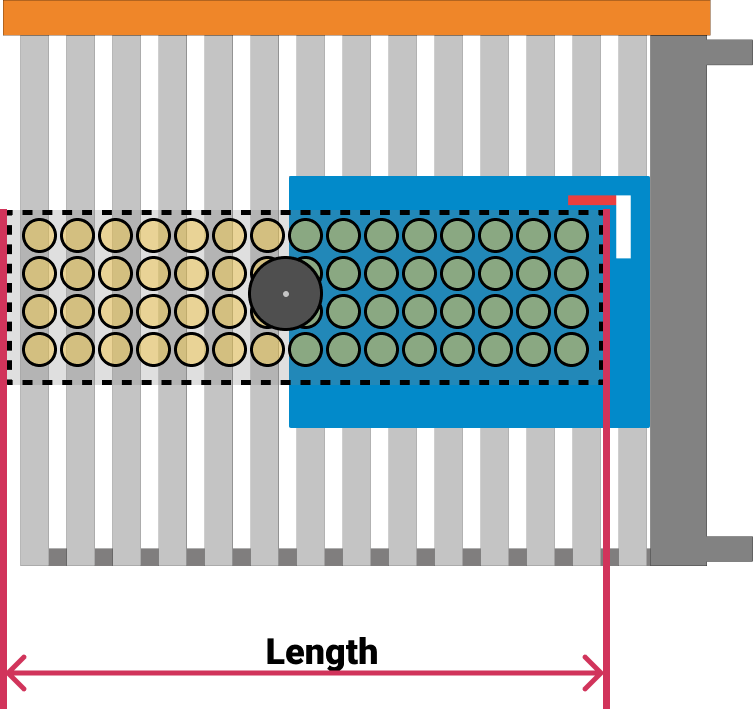
Longitud(Length)
Longitud de la garra. Expresada en milimetros.
 |
 |
|---|
#
Ángulo de anclaje(Anchor Angle) 📐⚓
Ángulo de instalación de la mano con respecto a la brida de unión del robot. Indicada en grados.
¿Cómo mido ese ángulo? 🤔
- Realiza un mosaico de una capa.
- Mide la desviación de los productos con respecto a la línea del palé.
#
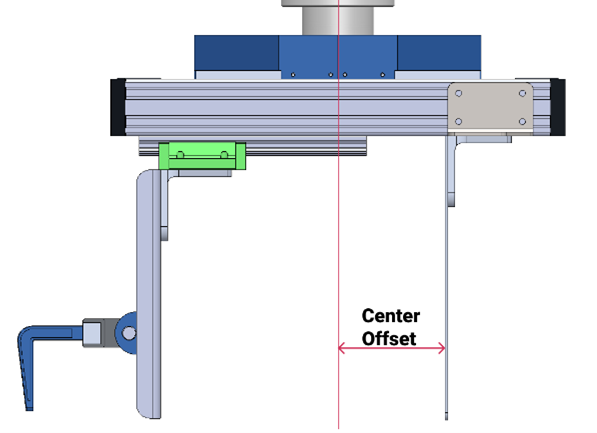
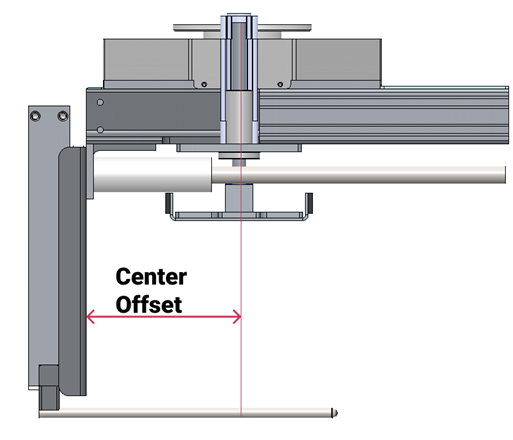
Center Offset 🎯
Distancia de separación entre el centro de la brida de unión y la superficie fija de la garra. Indicada en milímetros.
 |
 |
|---|
#
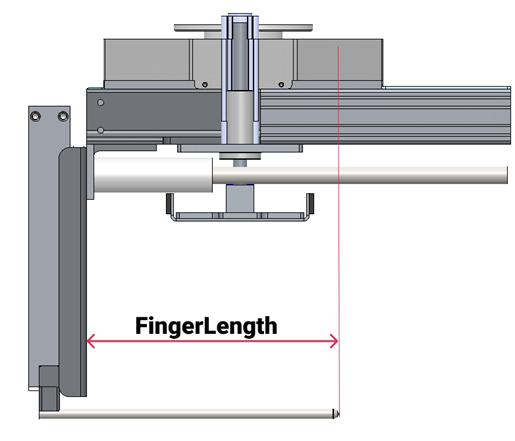
Longitud de dedos(Finger Length) 📏🖐️
Longitud de los dedos de la mano, indicada en milímetros.
#
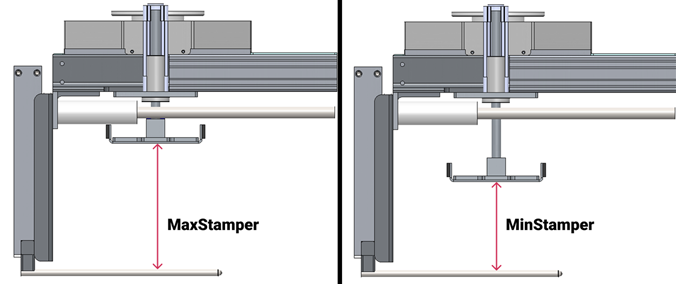
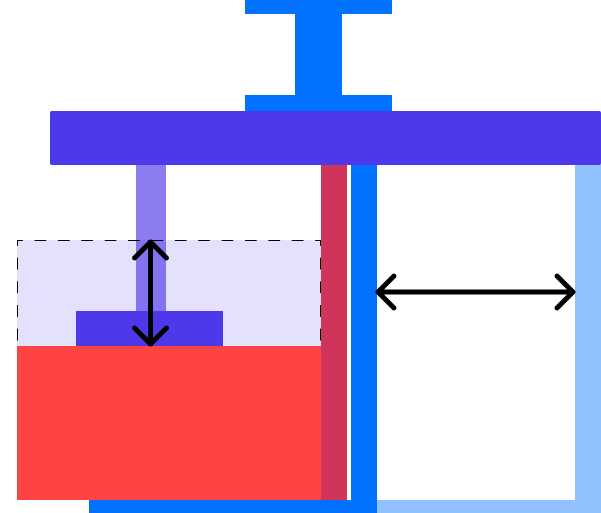
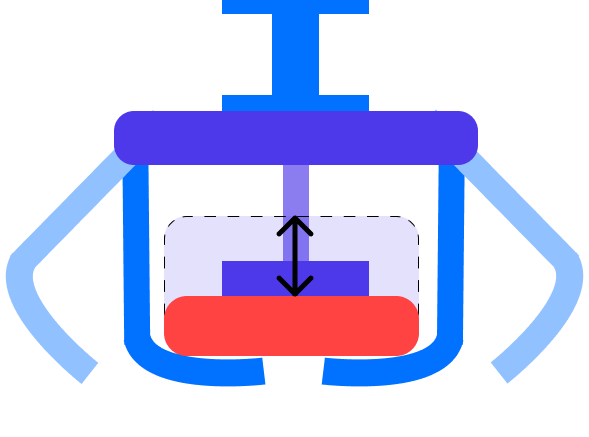
Max Stamper
Altura máxima del pisón. Indicada en milímetros.
#
Min Stamper
Altura mínima del pisón. Indicada en milímetros.