
#
End Effector Node
#
Descripction
This node defines the gripper installed on the robot, whose purpose will be to handle the products to be palletized.
#
Types
#
Asynchronous Tool (Async Tool)
#
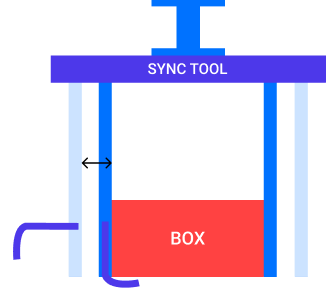
Synchronous Tool (Sync Tool)
#
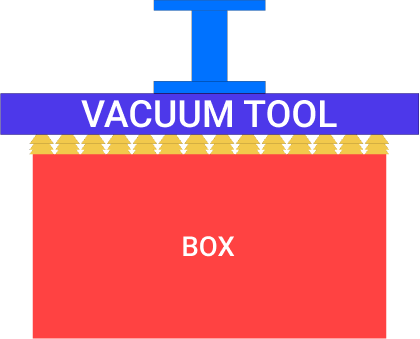
Vacuum Tool
#
Fork Tool

#
Servo Fork Tool
#
Bag Tool
+info
See PLC interaction manual.
#
Node connection
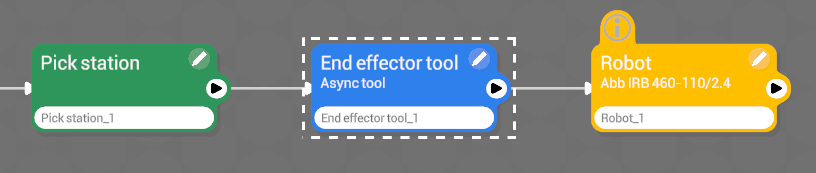
#
Assignment of variables
The variables of this node will be modified according to the type of End Effector Tool selected.
#
Variables
#
Name
Name assigned to the installed hand.
#
Type
Defines the type of gripper selected.
#
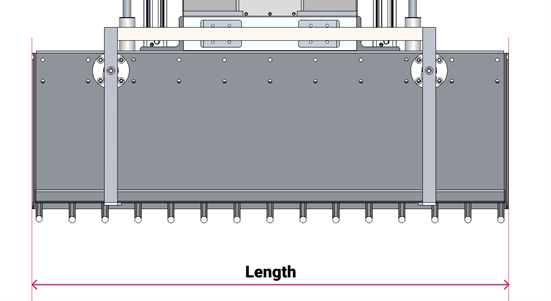
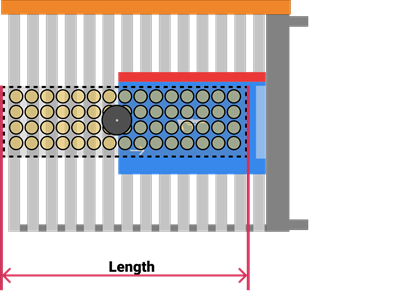
Length
Length of the gripper. Expressed in millimeters.
 |
 |
|---|
#
Anchor Angle 📐 ⚓
Angle of gripper installation with respect to the robot attachment flange. Indicated in degrees.
How do I measure that angle? 🤔
- Make a single layer mosaic.
- Measure the deviation of the products with respect to the pallet line.
#
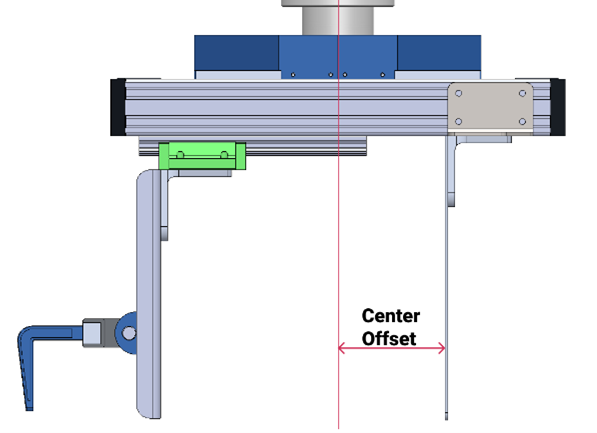
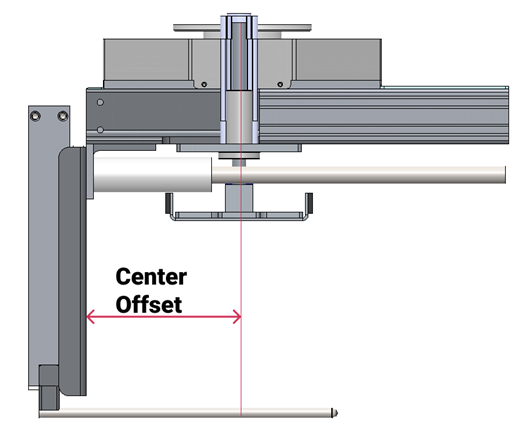
Center Offset 🎯
Clearance distance between the center of the mating flange and the fixed surface of the gripper. Indicated in millimeters.
 |
 |
|---|
#
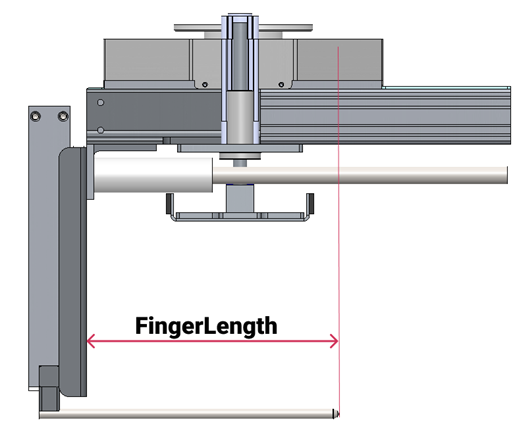
Finger Length 📏 🖐️
Length of the fingers of the hand, indicated in millimeters.
#
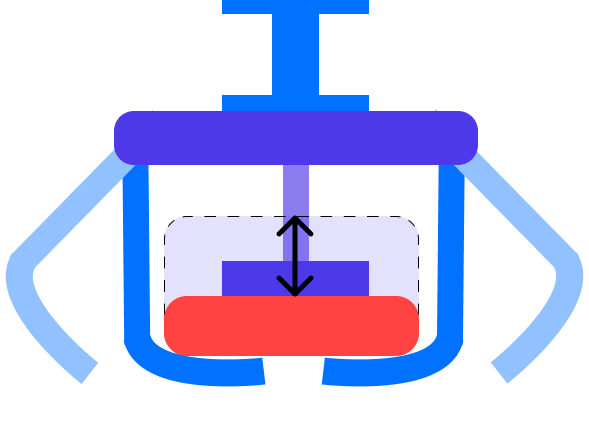
Max Stamper
Maximum height of the tamper. Indicated in millimeters.
#
Min Stamper
Minimum tamper height. Indicated in millimeters.
