#
Advanced options
#
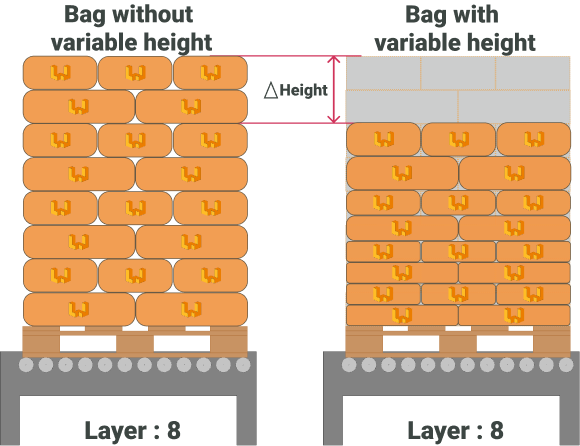
Bag Offset height adjustment of bags on pallet
Due to the problems involved in the correct positioning of the bags on a pallet, caused by the variation of the physical and morphological properties of the product contained inside the bag, throughout the working day.
From the Wepall team, we have enabled a communication channel between the PLC and the robot, which will allow the user to adjust the height from which the bag will be released in each execution cycle.
warning Warning
This option is only available in the bag gripper.
In case of transmitting a value of zero, it is considered that there is no compaction in the product and therefore with a constant product height. If the product is compacted, there is a difference in height between the current layer and the predicted layer, which will increase cumulatively in successive layers.

Once the Bag offset value is set for each movement and layer, the cycle time and bag release height on the pallet can be adjusted.

warning Warning
The Bag Offset value sent from the PLC to the robot must be a positive value, and the resulting positions must be within the robot's range volume.
warning Warning
The Bag Offset value is independent of the Pallet Height value. See the corresponding section of this manual.
#
Servo Gripper Control
warning Warning
The proposed solution is of a general nature, it must be validated by the programmer according to the technical characteristics of your installation.
The management of grippers that integrate a Servo, or any system of similar behavior, must be controlled by a PLC.
Through the communication channel established between the PLC and the robot, the robot will indicate whether the products must be rotated or not in each movement, as well as the dimensions of the product of the selected recipe.
The dimensions indicated on the wide side correspond to the side of the product that comes into contact with the stopper under normal conditions, i.e. without being rotated by the action of any electromechanical element controlled by the PLC.
Depending on its morphology, it will condition its behavior. Two different modes of behavior can be contemplated depending on the type of claw selected. Being:
- Asynchronous/synchronous claw.
- Fork claw.
Under normal conditions, the behavior is very similar.
If none of the products are rotated, the servo distance will be indicated by the Width of the product.
If all products are rotated, the servo distance will be indicated by the length of the product.

The main difference is seen in the case of a grouping of products in which rotated and non-rotated elements are combined.
In the fork gripper, the servo will take the value of the product width.
In the asynchronous/synchronous gripper, the servo will take the value of the length (Lenght) of the product.

warning Warning
In the case of a product grouping in which rotating and non-rotating elements are combined, the asynchronous/synchronous grapple must be equipped with multiple drives controlling independent movable blades.
#
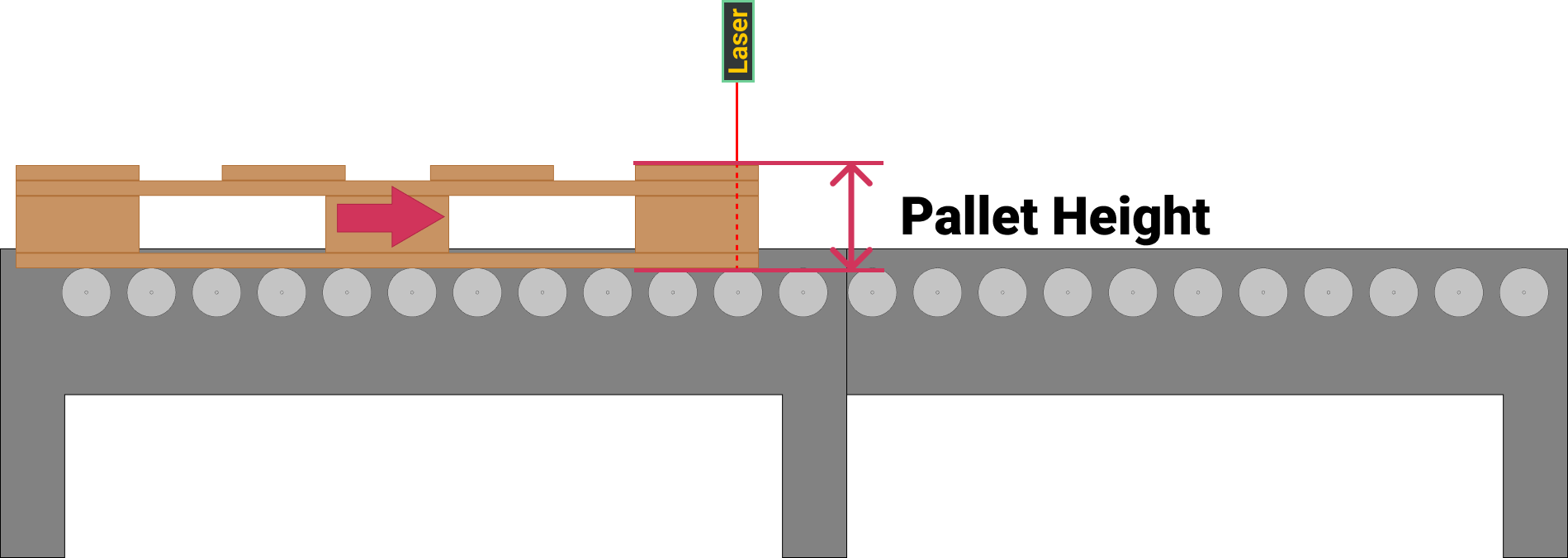
Pallet height measurement process
For the pallet height measurement process, static or dynamic means may be used. Static measurements are taken when the pallet is stationary and in a timely manner. In the case of dynamic measurements, they are taken continuously as the pallet moves forward. The values obtained during the sweep must be processed by the PLC to obtain a valid height value.
In both cases, aspects that may cause erroneous measurements, such as the following, will be taken into consideration:
- Gaps in the pallet.
- Damaged sections in the pallet.
- Differences in height between the sides of the pallet.
warning Warning
In case of detecting an abnormal measurement, which exceeds the safety margins defined by the programmer, the pallet should be discarded for safety reasons.
#
Pallet Height in palletizing sequence.
The Pallet Height value must be sent by the PLC in each execution cycle for the selected recipe. In case the PLC execution cycle alternates between 2 or more recipes, the pallet height value of the corresponding station must be changed. The activation of this functionality, supposes an alteration in the sequence of behavior of the robot. There are 2 possible situations, in the case of a bag gripper, or in the rest of the cases.
#
Asynchronous/synchronous/fork/vacuum gripper
In this case the pallet presence check at the palletizing station (Pallet Ready), changes from being performed in the step from point 7 to 8, to be performed in the step from 6 to 7. Prior to the confirmation of the pallet presence, the PLC will be sending the pallet height value through the corresponding communication channel.

#
Bag gripper
In this case, the pallet presence check at the palletizing station (Pallet Ready) is performed in the same position, at the transition from point 6 to 7. With the exception that, prior to the confirmation of the pallet presence, the PLC will be sending the pallet height value through the corresponding communication channel.

warning Warning
The Pallet Height value is independent of the Bag Offset value. See the corresponding section of this manual.