#
Preset End Effector
#
Descripción
Este preset define la garra instalada en el robot, y cuyo objetivo será manipular los productos a paletizar.
#
Tipos
#
Herramienta asíncrona(Async Tool)
#
Herramienta síncrona(Sync Tool)
#
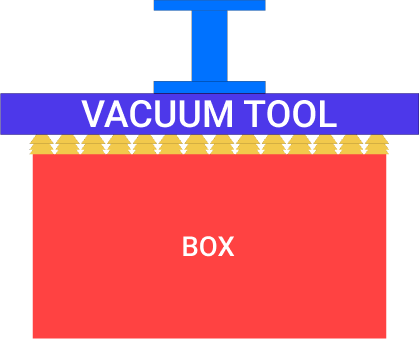
Herramienta de vacío(Vacuum Tool)
#
Herramienta de tenedor(Fork Tool)
#
Herramienta de servotenedor(Servo Fork Tool)
#
Herramienta de sacos(Bag Tool)
+info
Consultar manual de interacción con PLC.
#
Asignación de variables
Las variables de este preset, serán modificadas en función del tipo de End Effector Tool seleccionada.
#
Variables
#
Name (Nombre)
Nombre designado a la mano instalada.
#
Type (Tipo)
Define el tipo de garra seleccionada.
#
Zone Count (Número de zonas)
Si tu mano posee más de una zona (está preparada para sostener y dejar productos de forma separada en un único ciclo de colocación) debes definir cuántas de ellas tiene. El máximo de zonas definibles es 8.
#
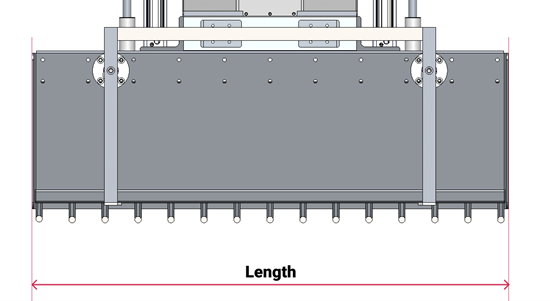
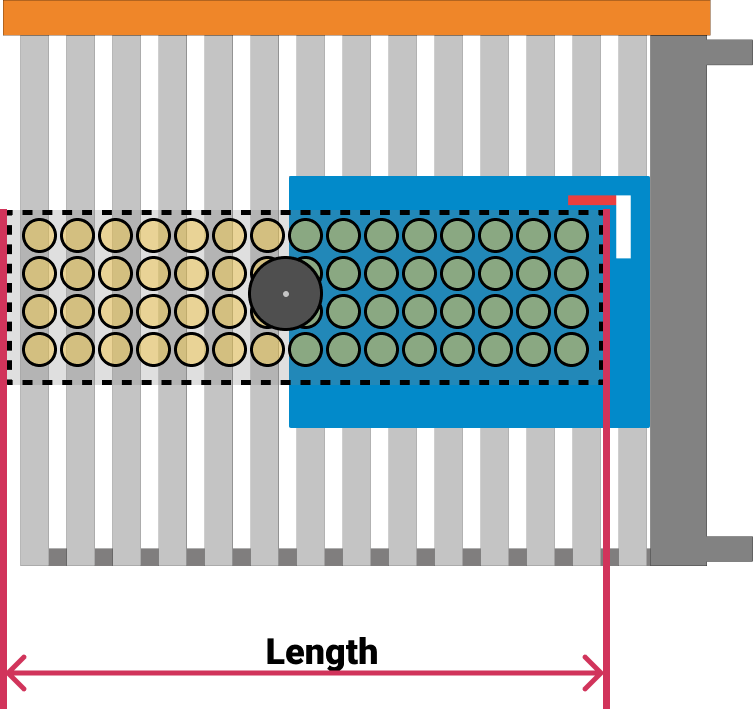
Length (Longitud)
Longitud de la garra. Expresada en milimetros. Si tu mano dispone de varias zonas, debes introducir la longitud total.
#
Length Zone N (Longitud de zona N)
Longitud de la zona N, expresada en milímetros, a lo largo de la longitud total. Se mostrará uno de estos campo adicionales por cada zona que se haya definido en el campo Zone Count (Length Zone 1, Length Zone 2, etc).
 |
 |
|---|
#
Anchor Angle (Ángulo de anclaje) 📐⚓
Ángulo de instalación de la mano con respecto a la brida de unión del robot. Indicada en grados.
¿Cómo mido ese ángulo? 🤔
- Realiza un mosaico de una capa.
- Mide la desviación de los productos con respecto a la línea del palé.
#
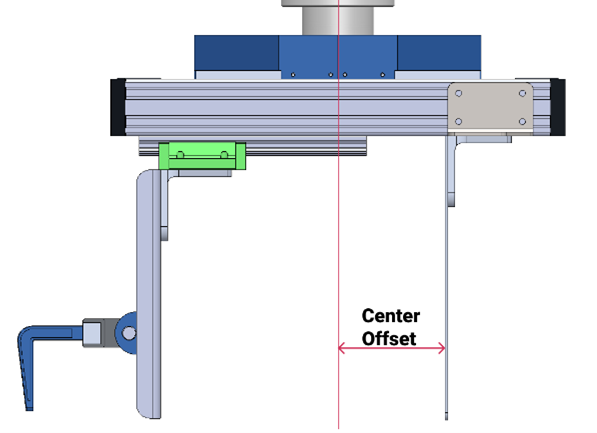
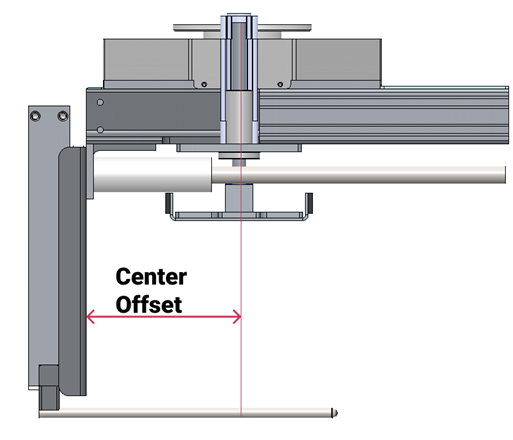
Center Offset 🎯
Distancia de separación entre el centro de la brida de unión y la superficie fija de la garra. Indicada en milímetros.
 |
 |
|---|
#
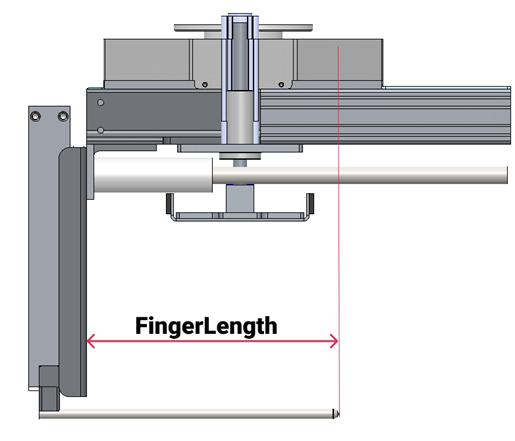
Finger Length (Longitud de dedos) 📏🖐️
Longitud de los dedos de la mano, indicada en milímetros.
#
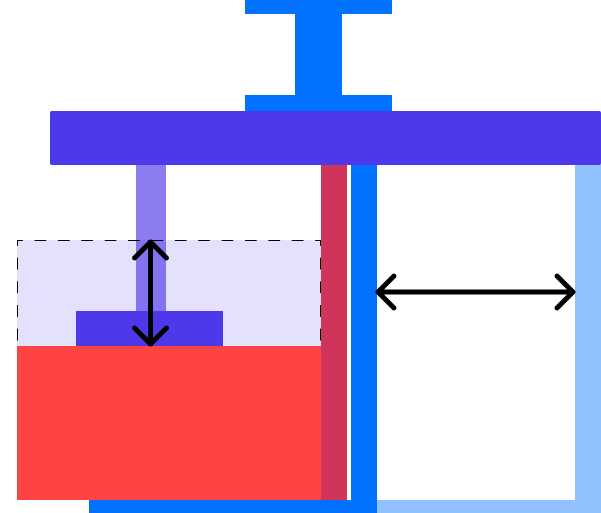
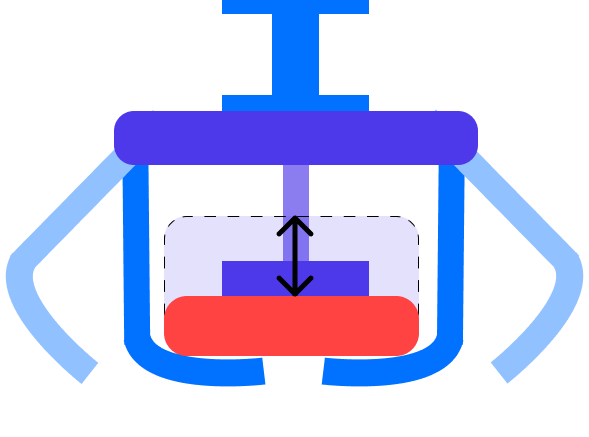
Max Stamper
Altura máxima del pisón. Indicada en milímetros.
#
Min Stamper
Altura mínima del pisón. Indicada en milímetros.