#
Tipos de garra compatibles con Wepall
Las Morfologías de garra compatibles con el entorno de Wepall son las siguientes:
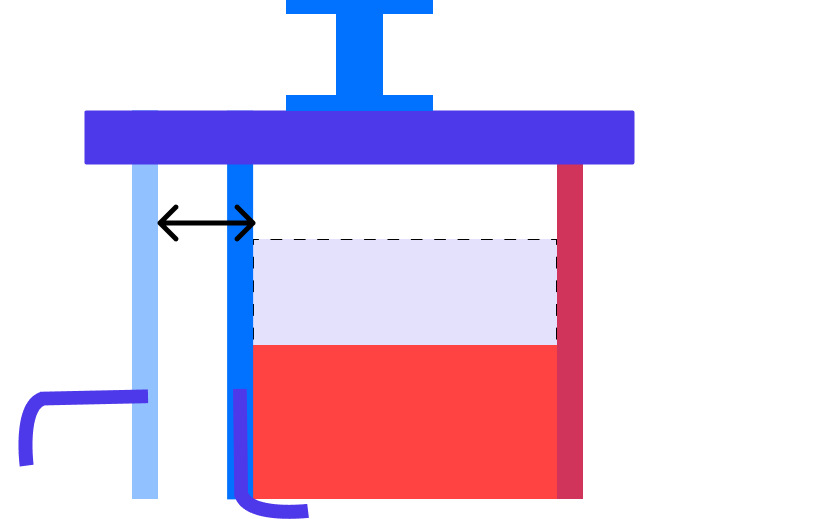
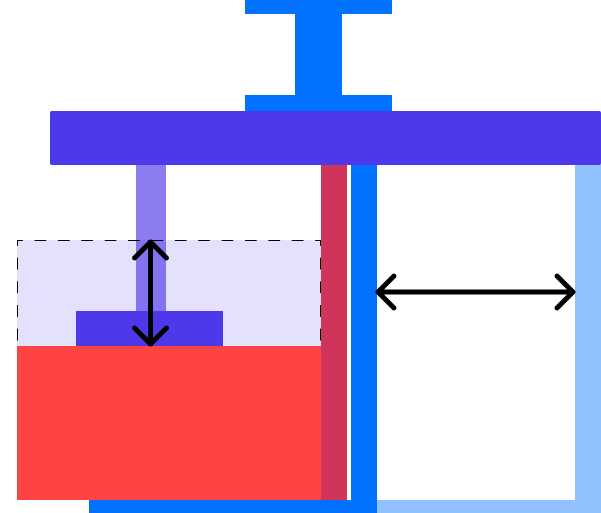
Garra que está dotada de dos palas y que por la presión que ejercen lateralmente sobre el producto, permiten su manipulación. En este caso concreto, presenta una de las palas estará fija, y la otra será móvil, siendo por lo tanto la encargada de ejercer la fuerza sobre el producto. Como elemento auxiliar de seguridad, se recomienda el uso de un elemento mecánico que sujete los productos por la parte inferior. Generalmente asociado a la pala móvil.
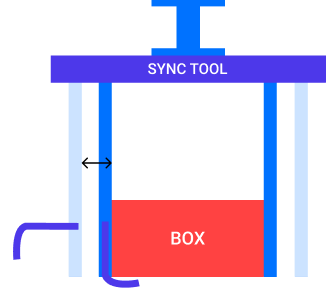
Garra que está dotada de dos palas y que por la presión que ejercen lateralmente sobre el producto, permiten su manipulación. En este caso concreto, ambas palas serán móviles, y su movimiento será sincronizado permitiendo que el producto quede centrado con el centro de la brida del robot.
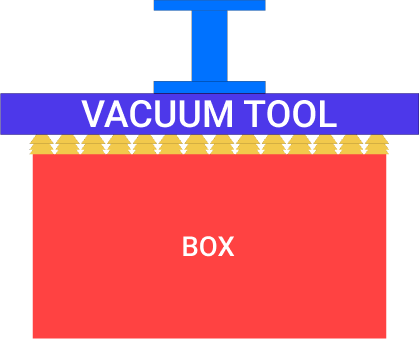
Garra que está dotada de un sistema de vació, que mediante la succión ejercida puede manipular el producto.
Garra que está dotada de un tenedor sobre el que estará depositado el producto. Adicionalmente equipa con una pala fija en el lado de apertura del tenedor, sobre la que se alineara el producto.
En la operación de toma del producto, la garra accede al pickup lateralmente, de forma que los dedos de la garra avanzan por debajo del producto. Para ello el pickup debe estar adaptado para tal fin.
Durante el movimiento de dejada del producto sobre el palé, al desplazarse el tenedor para liberar el producto, la pala fija mantiene el producto alineado e impide que se desplace.
Como elemento auxiliar de seguridad, se recomienda el uso de un elemento mecánico que desde la parte superior ejerza presión al producto contra los dedos del tenedor. Generalmente este elemento dispondrá de 3 estados, arriba (sin ejercer presión con el producto), abajo (ejerciendo presión en el producto) y en un estado intermedio en el que mantiene su posición, pero no ejerce presión, el cual es útil durante la operación de dejada del producto.
Este tipo de garra tiene un comportamiento similar a una garra de tenedor, pero su sistema de movimiento es mediante un servomotor. Para más información, consultar el apartado Servo gripper control de este manual.
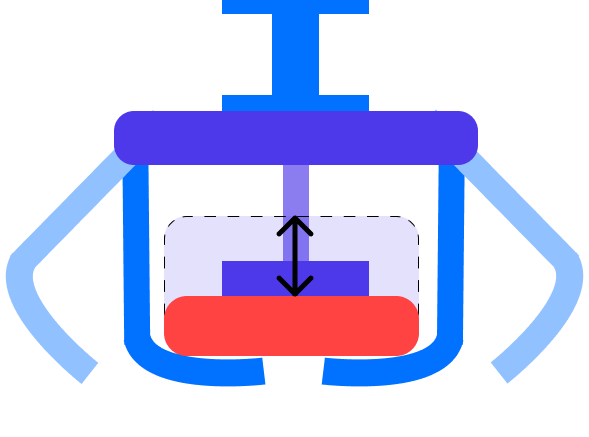
Garra específicamente diseñada para la manipulación de sacos. Dotada de unos elementos móviles que, al cerrarse sincronizadamente, envuelven al saco. De forma que el saco que apoyado sobre los mismos. En este caso, el saco deberá de quedar centrado con el centro de la brida del robot.
Como elemento auxiliar de seguridad, se recomienda el uso de un elemento mecánico que desde la parte superior ejerza presión sobre el saco contra los elementos de la garra. Generalmente este elemento dispondrá de 3 estados, arriba (sin ejercer presión con el producto), abajo (ejerciendo presión en el producto) y en un estado intermedio en el que mantiene su posición, pero no ejerce presión, el cual es útil durante la operación de dejada del producto.
warning Advertencia
Cualquier otra morfología o variación de las misma, consultar con el departamento técnico de Wepall.
warning Advertencia
La configuración de los nodos y el diseño del mosaico está condicionada por el tipo de garra seleccionada, consultar los manuales de configuración de nodos y de diseño de mosaico.