#
Inicio y control de ejecución del Robot
El inicio de ejecución del robot se realiza en función de los parámetros y criterios fijados por el fabricante del robot, así como de la controladora que se integre el proyecto. Dichos aspectos condicionan la detención o pausa del programa en ejecución, y el reinicio de la secuencia de ejecución.
warning Advertencia
Consultar con el equipo técnico de Wepall y/o con el fabricante del robot, la secuencia de arranque (automático externo) de su modelo de controladora/robot.
#
Selección de programa manual/automático
Una vez iniciada la ejecución del robot, se debe de seleccionar que programa ejecutar, ya sea el programa manual o el automático en función de ciertos bits transmitidos por el PLC.
Dicha selección será en función del tipo de gestión de programas integrado en el robot a la inicial de la secuencia. Por regla general, se contemplan 2 formas de gestión:
Por programa único inicial. En este caso, cada inicio ejecución pasara por un programa único, y será en este dónde se tome la decisión de si ejecutar el programa manual o el automático. (Ej: Programa Cell de Kuka).
Selección de programa específico. Este modo permite al PLC iniciar directamente el programa manual o el automático. (Ej: Sistema PNS de Fanuc).
warning Advertencia
El cambio entre un modo a otro, supone que se aborta la ejecución del programa en curso, para cambiar al nuevo modo.
Nota
Para más información, consultar con el departamento técnico de Wepall.
#
Programa manual
El programa del modo manual permite al usuario, mediante el PLC, enviar al robot a las coordenadas de home (Go to home) o de la zona de mantenimiento (Go to maintenance area) definidas en el software. Cuando el robot alcance la posición solicitada, se le indicará al PLC (In Home / In Maintenance). Así como mover mediante la interface HMI del PLC el robot.
warning Advertencia
La velocidad de desplazamiento en este modo es controlada por el PLC. Por cuestiones de seguridad, debe reducirse a un margen seguro, según la normativa vigente.
warning Advertencia
El uso inadecuado del movimiento en modo manual puede originar colisiones. Usar bajo supervisión.
#
Programa automático (Starter) y control de ciclo de ejecución
Al iniciar el programa de ejecución automática (Starter) el robot se desplazará a las coordenadas de Home. Una vez alcanzado este punto, se notifica al PLC mediante la señal In Home. A partir de este punto, el programa será controlado por la interacción de señales de PLC.
El programa automático se divide en 2 secciones. Una primera sección donde se gestiona los datos asociados a la receta seleccionada y su capa (Layer) u movimiento (Pick) a realizar. Y una segunda sección encargada de gestionar la secuencia de movimiento asociada al tipo de garra, la zona del mapping seleccionada y los datos cargados durante la carga de datos.
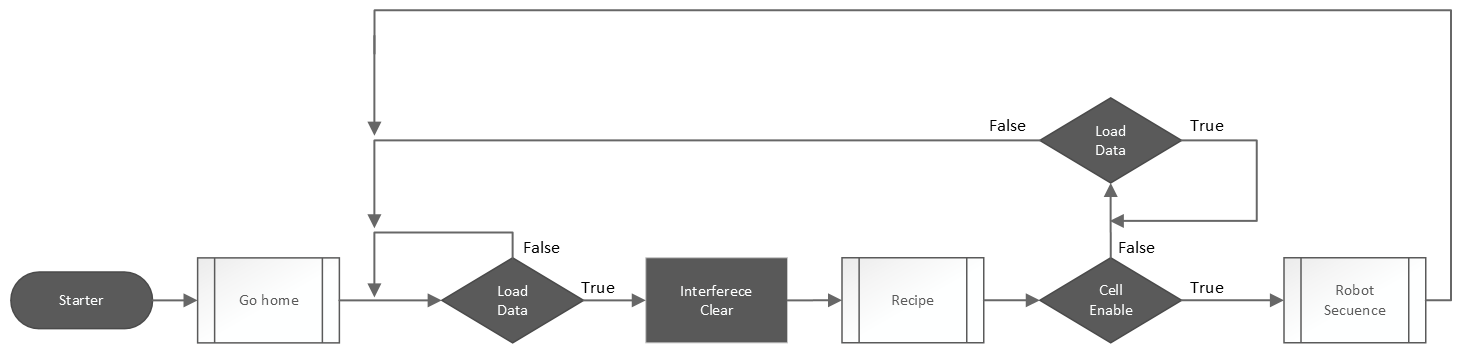
La ejecución de este programa es cíclica de forma, cada vez que se produzca una carga de datos y/o una secuencia de movimiento, se retorna a la sección de carga de datos para la actualización de la información del siguiente movimiento.
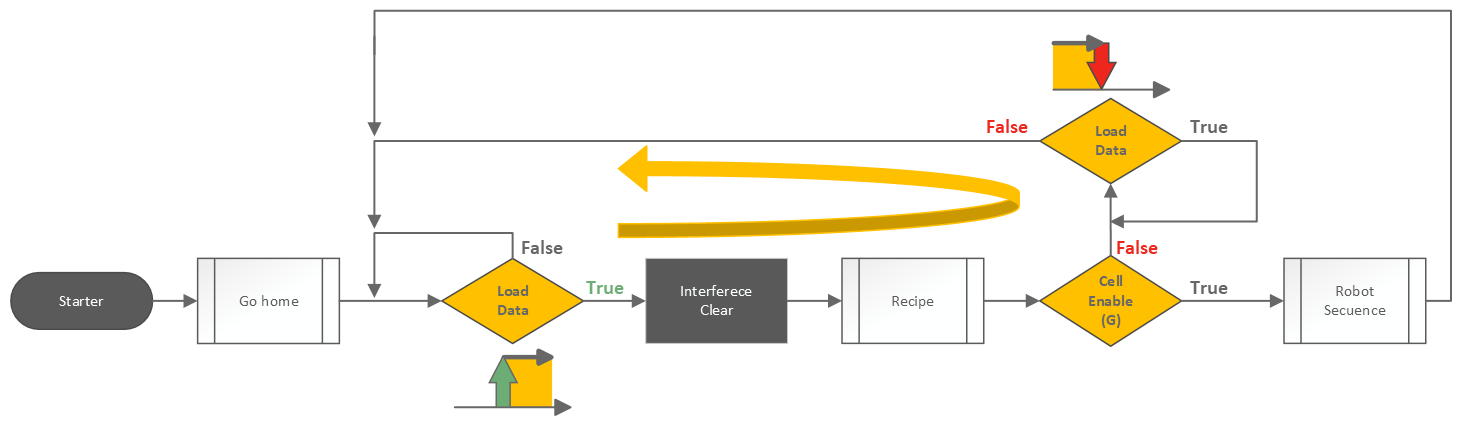
El proceso de carga de datos está condicionado por la señal Load Data. Si esta señal está a activa (true), se inicia el proceso de carga de datos, esta esté a su vez dividido en 2 apartados, el primero dedicado a que el PLC pueda resetear valores internos de la memoria del robot, y un segundo apartado con la carga de datos de la receta seleccionada, pudiendo en este punto forzar la carga de la información de una capa y/ pick concreto. Una vez finalizada la carga de datos se emite un pulso de la señal Data Loaded. A continuación, si la señal Cell enable (Global) está desactivada, el programa permanece a la espera de que se desactive la señal Load Data. Cuando esto sucede, retorna al punto de inicio de secuencia de carga de datos.
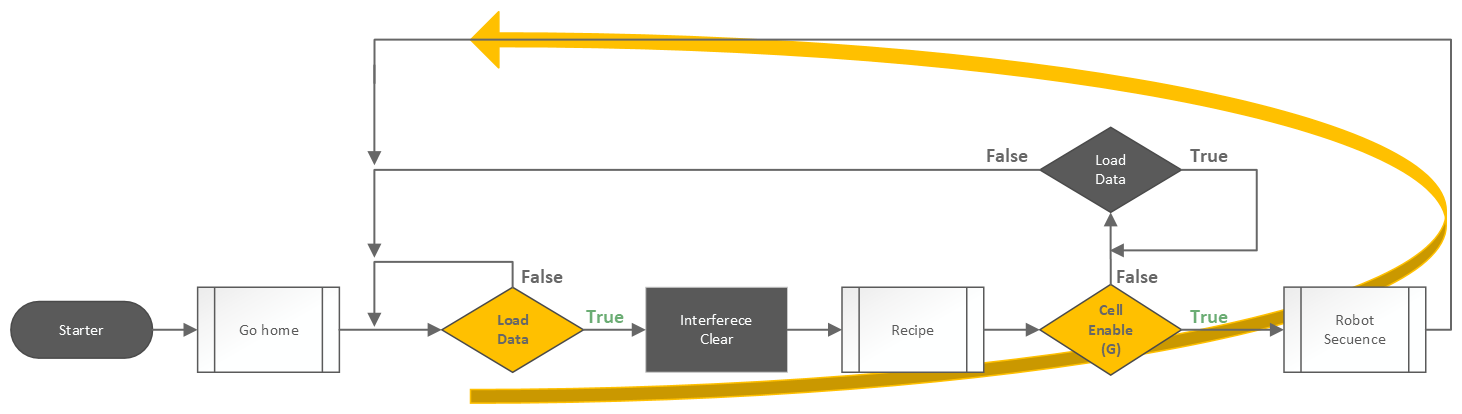
Si la señal Cell enable (Global) está activa, se procede a ejecutar la secuencia de movimiento asociada a la receta seleccionada.
Nota
Para más información de estas etapas, consultar los apartados específicos del presente manual.
Mediante el control de las señales Load Data, Cell enable (Global), y la asignación de zona de cada receta seleccionada, se puede controlar la gestión de múltiples estaciones de paletizado vinculadas a un mismo robot simultáneamente. Dicha lógica de control está condicionado a la morfología de la celda de paletizado y la metodología para su integración con el resto de elementos de la instalación.
Nota
Para más información sobre la gestión de múltiples estaciones simultáneamente, consultar con el departamento técnico de Wepall.
#
Limpieza de datos
En esta etapa del programa, se permite al PLC resetear valores internos de la memoria del robot, como son la altura a la que está paletizando el robot en cada estación/zona, entre otros datos.
Durante el proceso de carga de datos, se debe activar la señal Clear Data de la estación/zona deseada. Una vez que se produce el borrado de la información, se recibe como confirmación un pulso mediante la señal Data Cleared asociada.
Nota
Cuando se extraiga un palé de la estación de paletizado, y no entrañe ningún riesgo para las estaciones de paletizado con las que tenga interferencia, se debe de realizar la limpieza de datos de la zona asociada.
warning Advertencia
Resetear los datos asociados puede ocasionar colisiones indeseadas entre estaciones (zonas) que tengan interferencias entre si. Para más información consultar la sección de areas de interferencia.
#
Secuencia de carga de datos
En función de la receta seleccionada, se iniciará el programa que alberga toda la información asociada a la receta y mosaico. Una vez iniciado, comprobara si los datos de capa y pick son válidos, y en caso afirmativo, almacena en memoria las coordenadas de la secuencia de paletizado requerida y otros datos como son el número de productos requeridos y si van girados o no, entre otros.
En el caso de que la receta sea 0, se podrá enviar el robot a Home, mediante la señal de Go to home.
warning Advertencia
Un valor de capa, pick o receta no valido, supone la detención de la secuencia de ejecución.
#
Forzado de capa y/o pick
Para la edición de los valores de capa y pick, previamente a la carga de datos, se debe activar la señal Force Counters correspondiente a la zona de la receta activa. Una vez que se finalice la actulización de los contadores, y los datos esten cargados en memoria, se recibe un pulso de la señal Data Loaded. Una vez recibido este pulso, se desactivará la señal Force Counters.

#
Ejecución de secuencias de paletizado
Con posterioridad al proceso de carga de datos, si la señal Cell enable (Global) se encuentra activa, se inicia la secuencia de paletizado.
En función del tipo de garra seleccionada, presenta un tipo de secuencia estándar de paletizado distinta. Por defecto se contemplan 4 programas diferentes de cada secuencia de paletizado, al integrar el mapping 4 zonas (Pick-Pack) distintas. Cada uno de estos programas emplea direcciones de memoria diferentes, en función de cada una las zonas.
Al seleccionar una receta, durante el proceso de carga de datos, se registra internamente cuál de estos programas será ejecutado. Este valor se definió mediante el valor zona en el nodo de la estación de paletizado.
Nota
Para más información sobre los distintos secuencia en función del tipo de garra, consultar los apartados específicos del presente manual.