#
Interacción con PLC
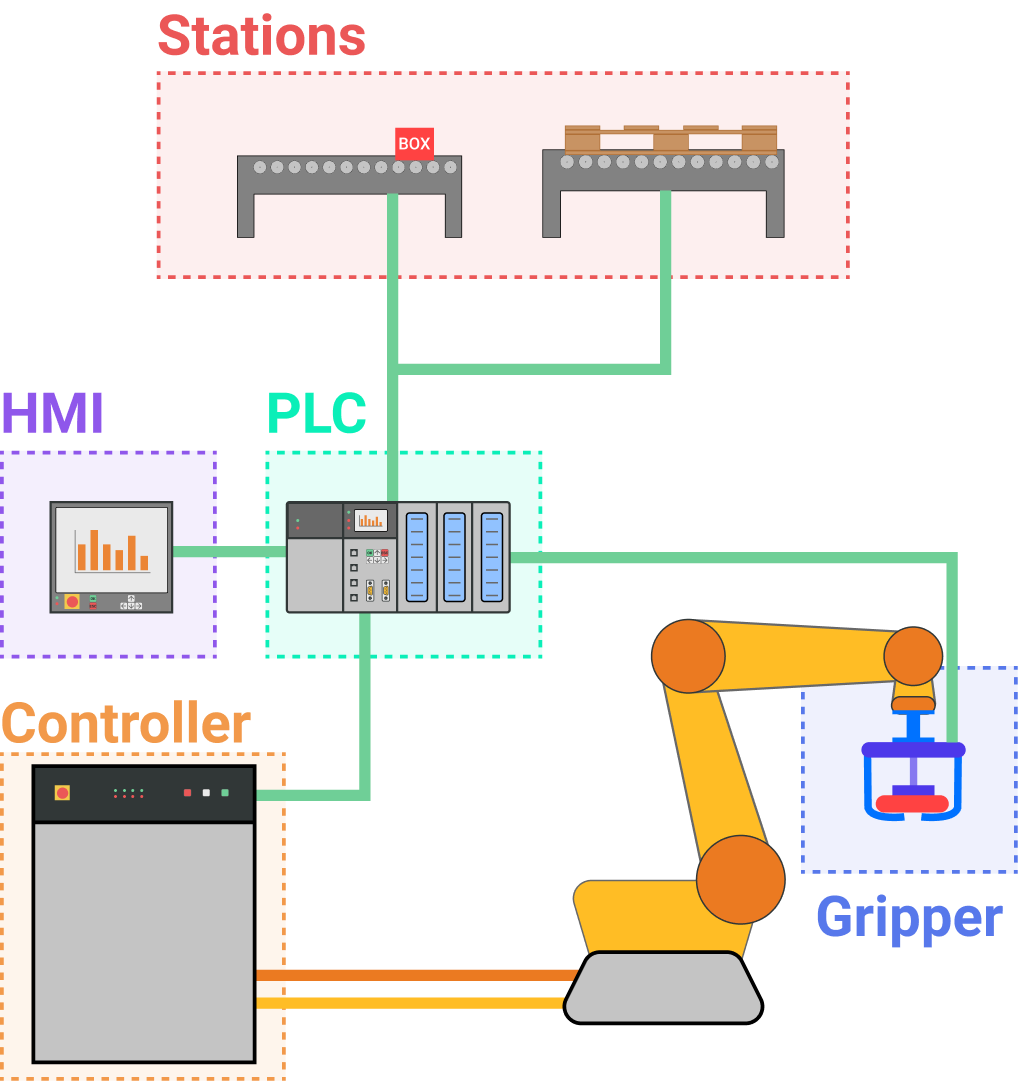
La gestión de entradas/salidas será llevada a cabo por el PLC, incluida la gestión de la garra. Al centralizar la toma de decisiones en el PLC, se obtiene un sistema más robusto y eficiente, debido fundamentalmente a las limitaciones técnicas que presentan las unidades de control asociadas al robot, además de su limitación en entradas/salidas.
La sincronización entre el PLC y el robot es la clave de toda la instalación, ya que determinará la fiabilidad del sistema. Considerando una instalación típica de paletizado, los siguientes apartados pautarán la programación del PLC, y su interacción con el robot.
Es importante tener en consideración, a la hora de la programación del PLC, los retardos de los distintos sistemas mecánicos presentes en el sistema. Ya que, de no ser considerados, pueden generar fallos de funcionamiento en la instalación. Un ejemplo de esto, es el retardo en la apertura de la garra al dejar el producto sobre el palé, de no establecer un retardo o una señal directa asociada, la apertura puede realizarse durante el retorno al pickup, proyectando el producto y pudiendo generar daños en la instalación, así como paradas indeseadas. La gestión óptima de los retardos aumentará la productividad global del sistema, así como minimizará los errores que puedan surgir durante la puesta en marcha.
El desplazamiento del robot se basa en movimientos punto a punto y la sucesión de dichos puntos define la trayectoria a desarrollar por el robot durante el ciclo de ejecución. La secuencia de puntos durante el proceso de paletizado dependerá del tipo de garra a instalar.
Los puntos son calculados por Wepall en función de los parámetros insertados por el usuario en la configuración de los nodos y el diseño del mosaico.
#
Control de celda de paletizado
Lo programas generados por el usuario con Wepall deberán de ser cargados al mediante los medios que tenga establecidos el fabricante del robot (FTP, puerto USB, …).
La secuencia de programa generado por Wepall, así como la interacción de las señales implicadas, es un estándar de Wepall. Por lo tanto, la programación del PLC estará acorde a dicho estándar y a la secuencia del programa seleccionada.
El control de los elementos integrados en la instalación será realizado por el PLC, incluyendo la gestión de la garra del robot.
warning Advertencia
En el supuesto de que el control de la garra deba ser realizado por el robot de forma directa y no mediante el PLC, consultar con el departamento técnico de Wepall.
El PLC y el robot deben de estar enlazados mediante un protocolo de comunicación industrial, siendo la longitud de la trama de datos condicionada por los elementos integrados en la instalación, partiendo de un mínimo de 256bits de entrada/salida. La velocidad de transferencia deberá de ser lo suficientemente alta como para evitar retardos indeseados.
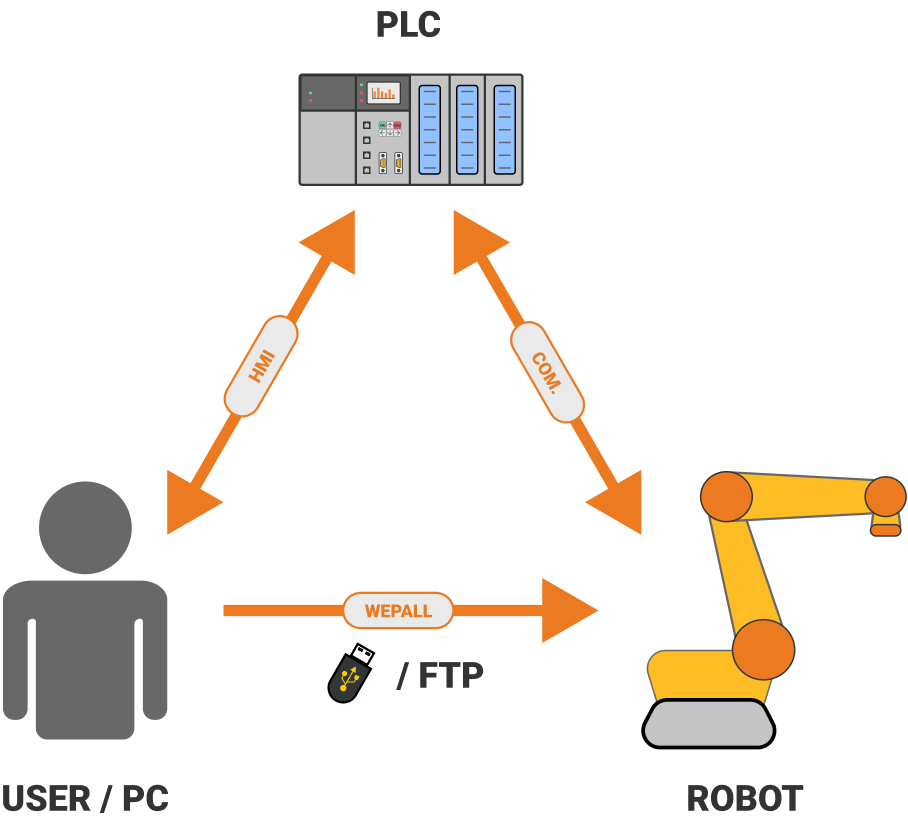
La comunicación e interacción de señales está definido por el mapping de Wepall. El cual relaciona las entradas del Robot con las salidas del PLC, y a su vez las salidas del robot con las entradas del PLC.

Nota
Para más información, consultar el manual de descripción de señales del mapping y la tabla de mapping (Excel).
#
Gestión de zonas de mapping
La sección del mapping encargada de gestionar el comportamiento del pickup y de la estación de paletizado. Se encuentra dividida en 4 zonas, cada una de ellas está dividida en las siguientes secciones:
- Pick, con todas las señales implicadas en el proceso de toma del producto.
- Pallet Station, con las señales implicadas durante el proceso de colocación de los productos sobre el palé.
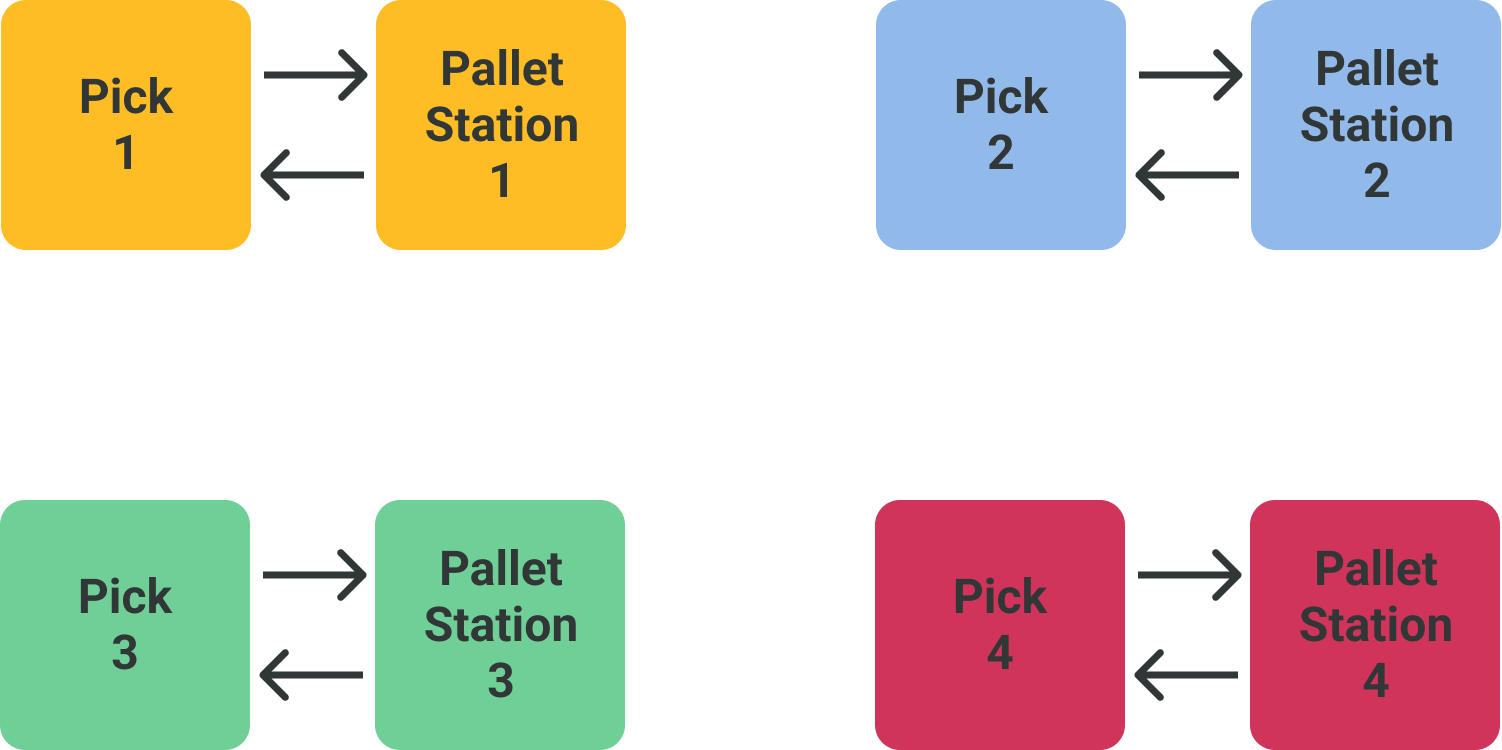
La lógica de control de las 4 posibles zonas, será independiente de la zona seleccionada. La programación del PLC debe de adaptar las señales de comunicación implicadas, en función del valor de zona de la receta seleccionada.
warning Advertencia
No es posible combinar las señales implicadas en las distintas zonas (Ej: Pick 1 – Pallet Station 3).
La elección de la zona se realiza en el campo asociado al nodo de la estación de paletizado (Pallet station). Todas las recetas que empleen ese nodo emplearan la misma zona seleccionada.
Nota
Para más información, consultar el manual de configuración de nodos y de descripción de señales del mapping.