#
Gestión avanzada de pickup
#
Rotación de productos en pickup
Solo estará presente físicamente con las garras de tipo Fork tool y Async tool, al ser las únicas que disponen de parte fija en contacto con el producto.
En el resto se considera su presencia de forma virtual. Puede cambiarse su posición pulsando Finger.
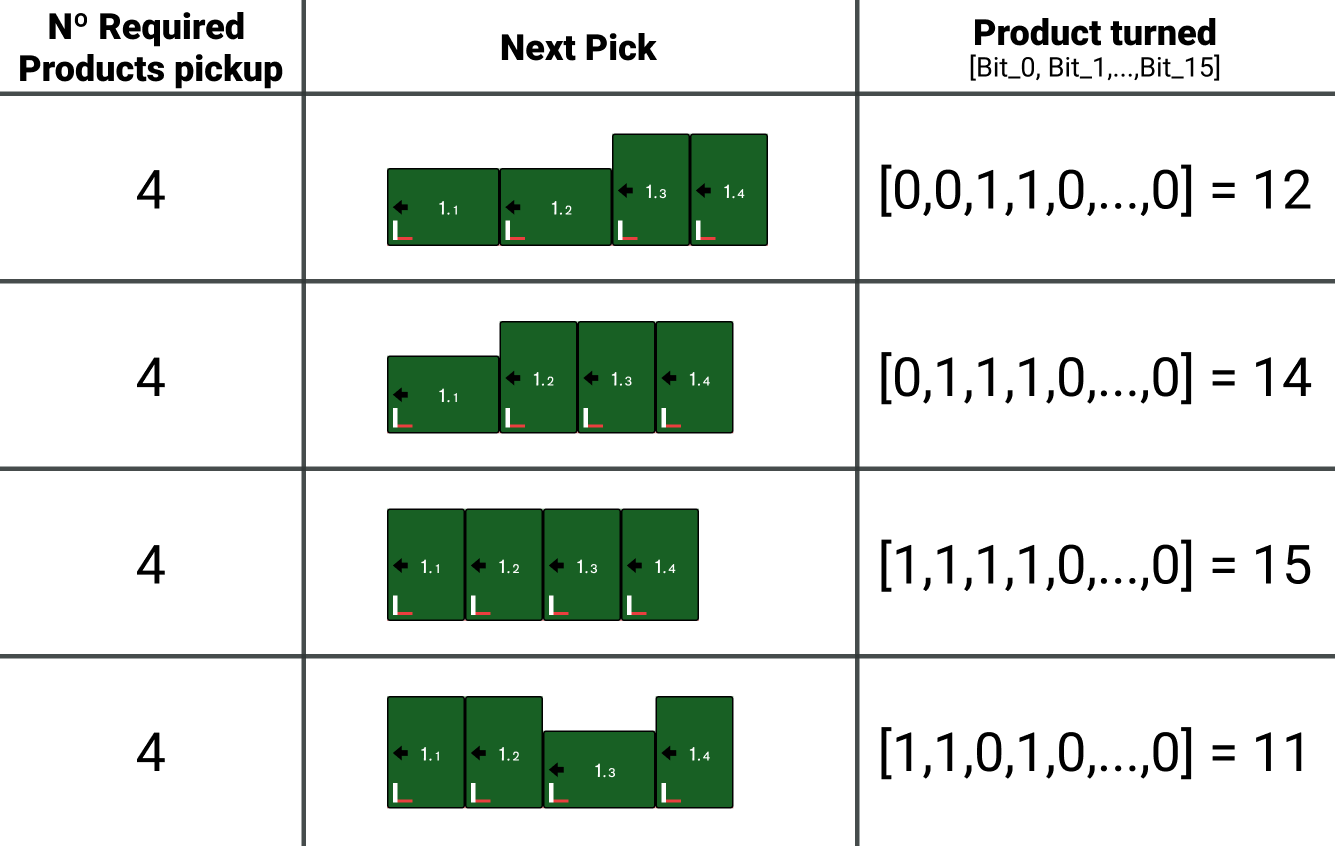
Con esta función activa, durante el ciclo de ejecución, el robot le enviará al PLC mediante el canal de comunicación, un grupo de 16 bits con los datos de giro de cada producto de dicho movimiento. Cada bit corresponderá a un producto, siendo el bit 0 el primer producto y el bit 15 el producto número 16 de la agrupación.
Un valor de 'False / 0' indica que el producto no está girado, y un valor de 'True / 1' indicará que el producto deberá girar 90º. El PLC será el encargado de controlar los elementos electromecánicos existentes en el pickup para girar los productos según su orden de entrada.
| Normal [Reference Side: Right] |
 |
| Producto rotado por PLC Integrando elemento que permita el giro |
 |
#
Señales de giro de productos (Robot -> PLC)
Diferentes casos para entender como debe ser la interacción entre los productos solicitados por el robot y como debe gestionar el plc la entrada de productos.
#
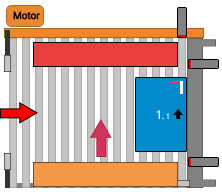
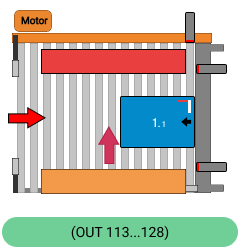
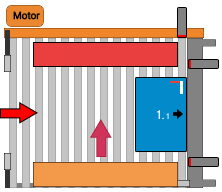
Uso de coordenadas de pick invertido
Esta función permite indicarle al robot, que use para el movimiento indicado, las coordenadas de pick invertido.
En condiciones ideales, corresponderán a la garra girada 180º con respecto a las coordenadas de pick normales. También podrá ser empleada cuando se necesite alguna posición especial para tomar el producto por su morfología, así como para pickup con diseños especiales.
Esta opción estará disponible en todos los tipos de garra, excepto en las de tipo Fork.
| Normal [Reference Side: Right] |
 |
| Uso de coordenadas invertidas |
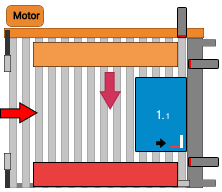 |
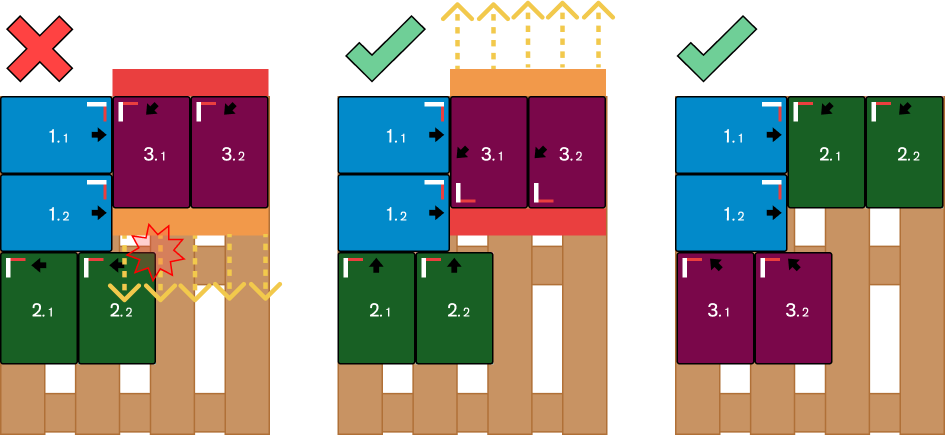
Este factor ha de ser considerado a la hora de diseñar un mosaico, ya que el comportamiento de las distintas partes móviles podría generar colisiones.
El ejemplo siguiente representa el comportamiento de una mano tipo Async tool.