
#
Prest Station - Pallet Station
#
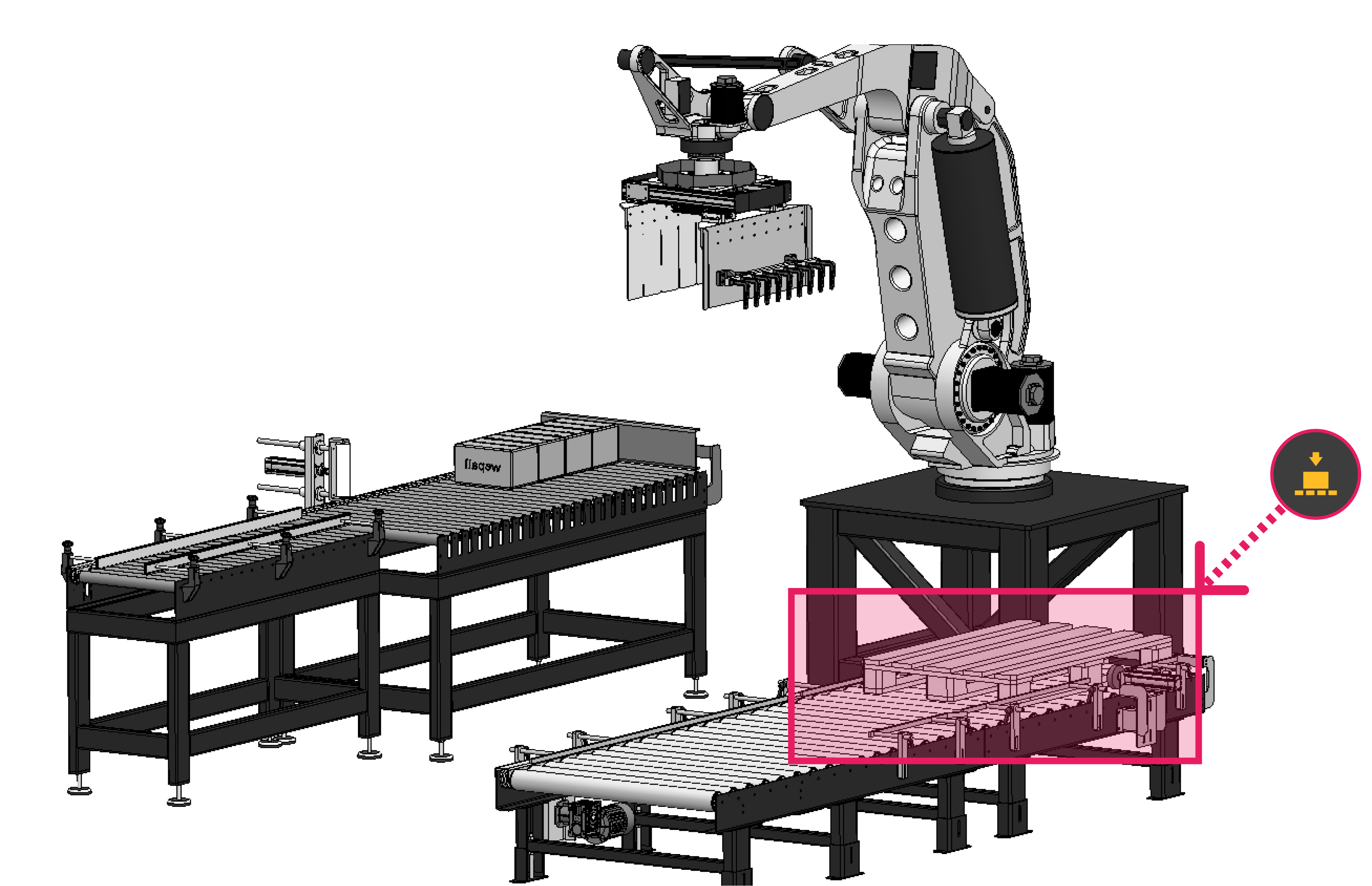
Descripción
Corresponde a la estación de paletizado donde se colocará el palé, y sobre este irán los productos a paletizar.
#
Variables
#
Name (Nombre)
Nombre dado por el usuario al nodo.
#
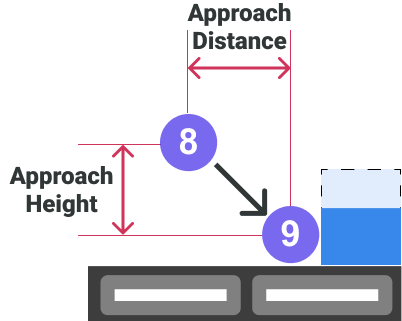
Approach Distance (Distancia de aproximación)
Distancia entre el punto 8 y el 9 desde una vista superior (Vector formado entre las coordenadas X e Y de los puntos 8 y 9). Indicada en milímetros.
#
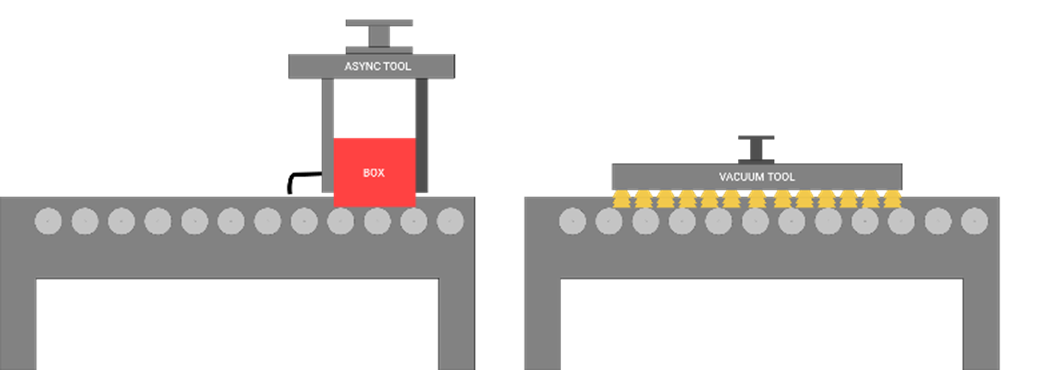
Approach Height
Es la altura desde la que se realiza la aproximación de la dejada, por ejemplo, para evitar doblar las solapas de la caja. Este valor debe ser siempre menor que la altura del producto. Indicada en milímetros.
#
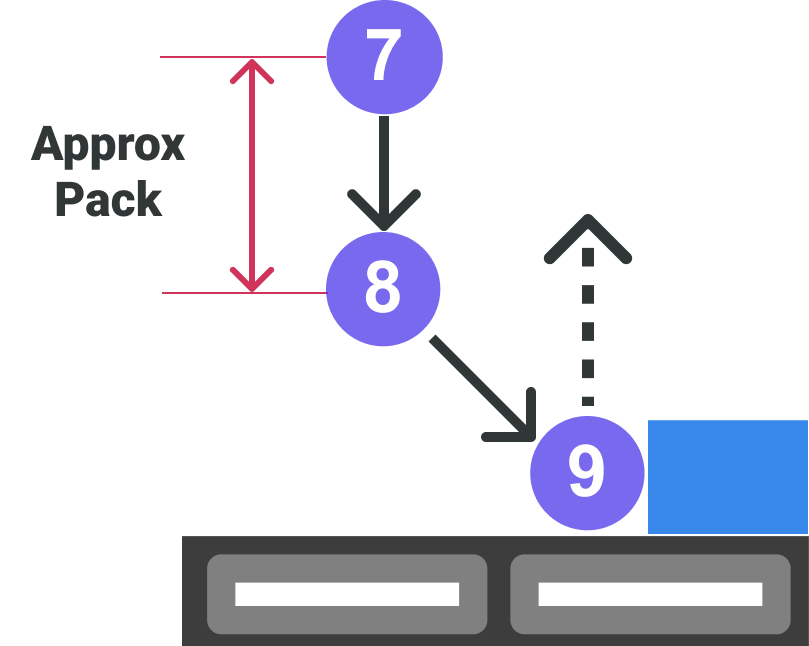
Approx Pack
Altura desde la posición de pack hacia pose 7
#
Pallet Station Z
Coordenada Z (altura) del palé, la que determina la altura a la que se realizarán los movimientos de la primera capa del palé. Las sucesivas alturas de capa serán generadas por Wepall de forma dinámica. Indicada en milímetros.
La altura de referencia será suministrada por el eje Z del robot al posicionar la garra sobre el transporte de la estación de paletizado, y sin la presencia de palé.
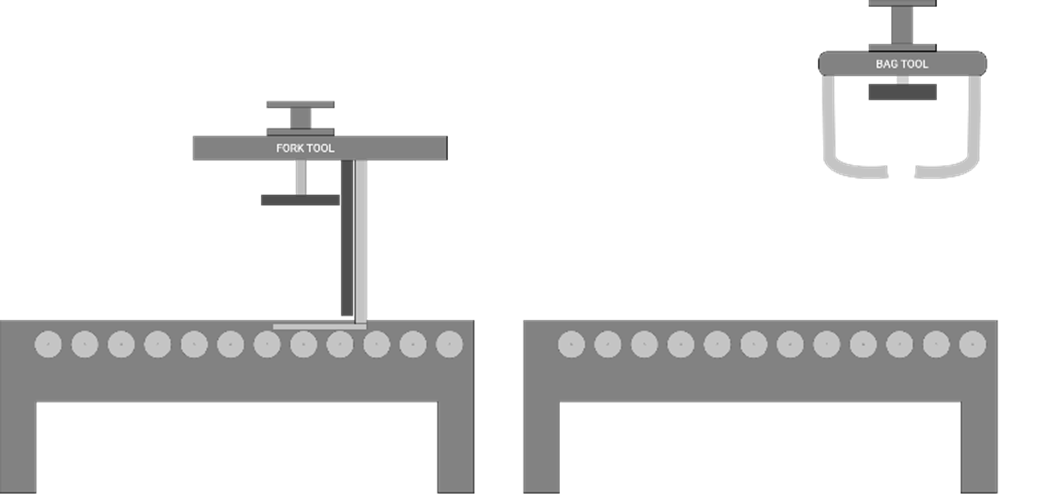
La variación de la altura de dejada de producto sobre el palé en la garra de palas, en función de la altura de pick, requiere que la toma de este valor, se realice con un producto tomado desde el pick.
En el caso de la garra de sacos, este valor define la altura base desde la que se soltaran los sacos.
#
Rear X
Coordenada X del punto de origen del sistema de coordenadas que define la posición del palé, que será representado en el apartado de diseño de mosaico por la esquina superior izquierda. Este campo está en milímetros.
#
Rear Y
Coordenada Y del punto de origen del sistema de coordenadas que define la posición del palé, que será representado en el apartado de diseño de mosaico por la esquina superior izquierda. Este campo está en milímetros.
#
Front X
Coordenada X del punto que representa la dirección del sistema de coordenadas que define la posición del palé. Este campo está en milímetros.
#
Front Y
Coordenada Y del punto que representa la dirección del sistema de coordenadas que define la posición del palé. Este campo está en milímetros.
#
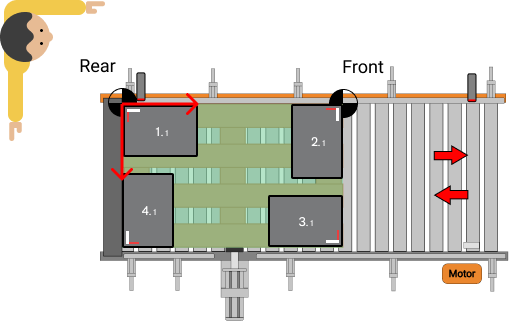
Proceso de adquisición de puntos Front-Rear
#
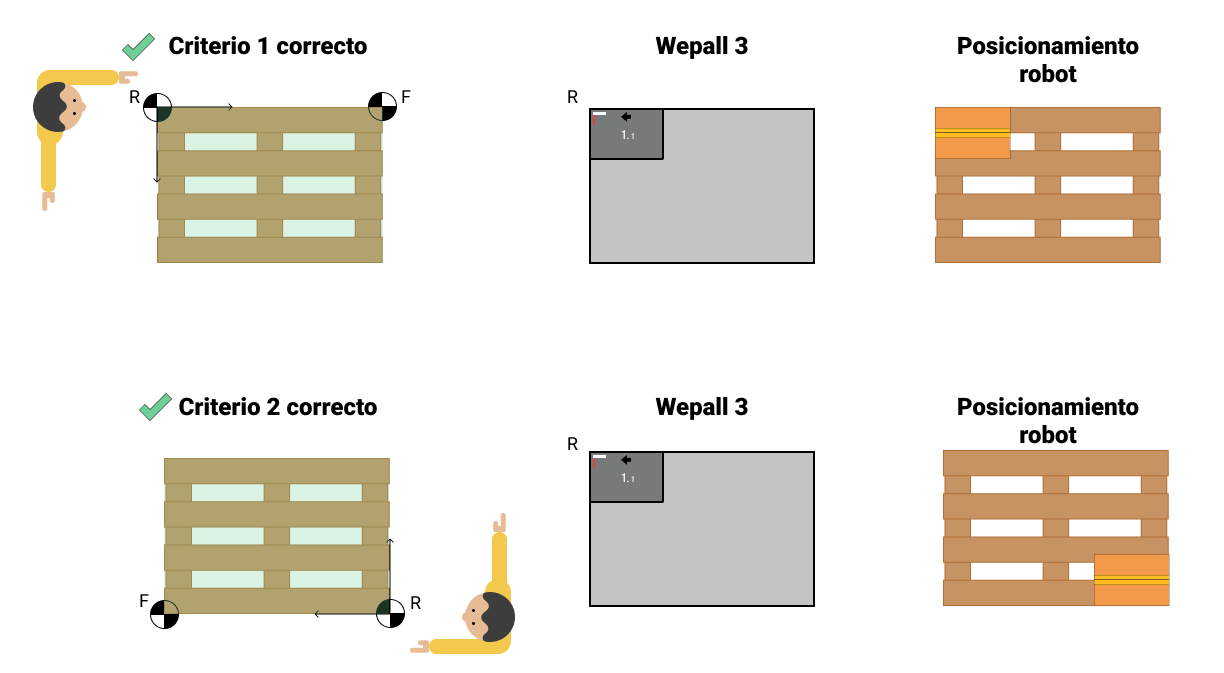
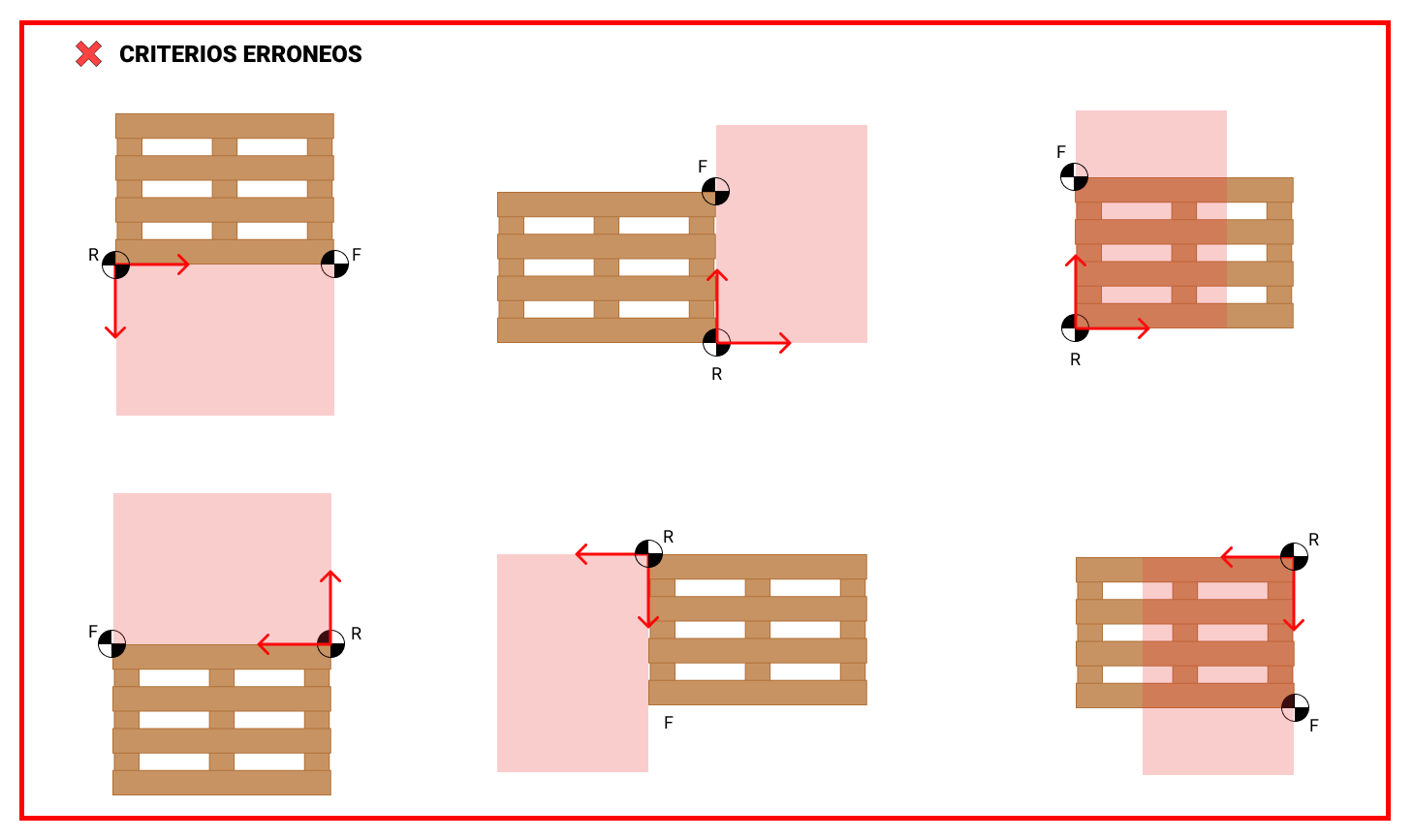
Definición de criterio
El vector formado por Front y Rear, deberá estar en uno de los lados largos del palé.
Alinear el brazo izquierdo con el lado largo del palé donde se vaya a posicionar los puntos Rear y Front. Con el brazo derecho a 90º sobre la horizontal, el palé debe de hallarse en el ángulo comprendido por ambos brazos.
El punto Rear corresponderá a la esquina más próxima al usuario, y el Front la más alejada.
La elección de un criterio erróneo, supondrá errores cuando se depositen los productos en la estación de paletizado.
#
Obtención de puntos
Equipar la brida del robot con un sistema de referencia (puntero laser, plomada, …)
El sistema de referencia deberá de estar alineado con el centro de la brida, y esta deberá de estar paralela al suelo.
Mover el robot en manual en coordenadas mundo, y sin ningún parámetro que altere las coordenadas de referencia.
Una vez que el sistema de referencia este sobre el punto a medir (Rear/ Front), visualizar las coordenadas en el teach del robot (X e Y), e introducirla en el software.
Repetir los pasos 3 y 4 para tomar el punto restante.
#
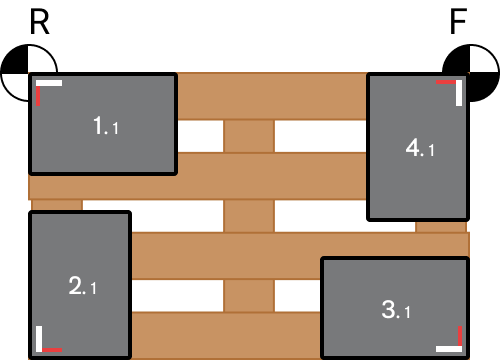
Verificación de la configuración
Una vez que todos los parámetros del proyecto estén configurados y el PLC programado para interactuar con la secuencia generada con Wepall.
- Crear un mosaico de calibración, cuando las dimensiones de la garra lo permitan, con 4 cajas en las esquinas del palé y con los lados de los productos (pala fija y stopper) alineados con los laterales del palé.
 |
|
Para más información consultar el manual Edición de mosaico
- Cargar el código fuente generado en el robot, y verificar que el robot posiciona las 4 cajas en las esquinas del palé según fue diseñado el mosaico.
#
Variables de columna elevadora en Pallet Station
Una vez habilitada la columna elevadora en el Preset Robot, estos campos aparecerán en el Preset Pallet Station.
#
Lift Z
Valor de posición de la columna elevadora asociada al valor de Pallet Station Z del preset Pallet Station. Indicada en milímetros. Sólo disponible para robots colaborativos.
El valor Lift Z del preset Pallet Station es diferentes del valor Lift Z del preset Pick Station y al de Interlayer Station.