
#
Preset Station - Pick Station
#
Descripción
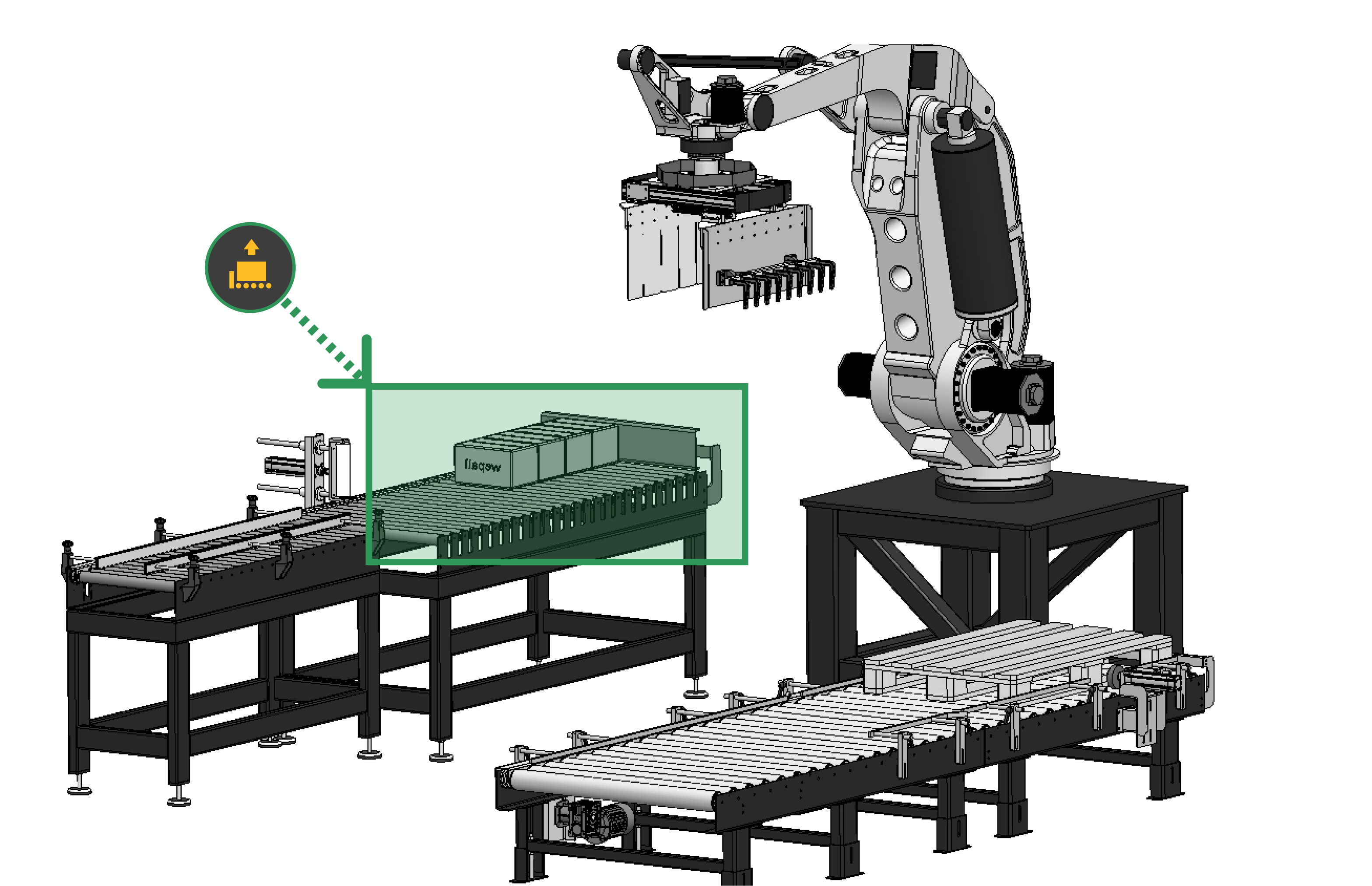
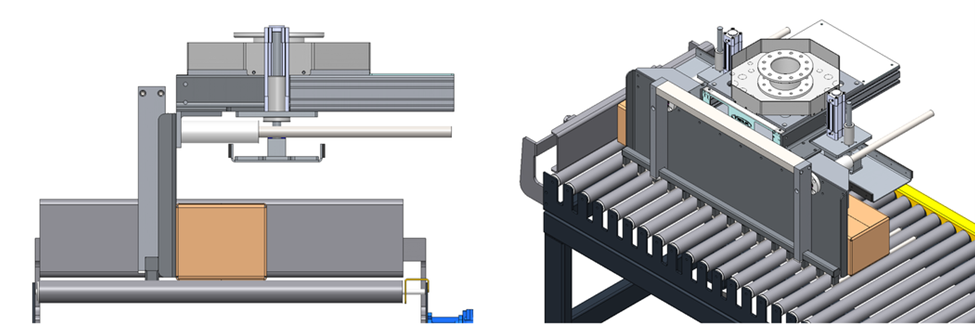
Corresponde a la estación de recogida de producto donde se tomará el producto a paletizar, tambien conocido como pickup.
#
Asignación de variables
Las variables de este preset, serán modificadas en función del tipo de End Effector Tool seleccionada.
#
Variables
#
Name (Nombre)
Nombre definido por el usuario para identificar el pickup.
#
[X,Y,Z,R]
Coordenadas del punto donde el robot tomará el producto en el pick en condiciones normales.
Para más información, consultar el apartado de obtención de coordenadas de este manual.
Un error en la transcripción de los datos en este apartado, puede originar colisiones.💥
#
Inverted [X,Y,Z,R] (Invertida [X,Y,Z,R])
Coordenadas del punto invertido donde el robot tomará el producto en el pick. En esta posición, la pala fija debe de estar situada en el lado opuesto de la posición de pick. Podrá ser empleado en todas las garras excepto las de tenedor.
Para más información sobre su obtención, consultar el apartado de obtención de coordenadas de este manual.
 |
 |
|---|
Un error en la transcripción de los datos en este apartado, puede originar colisiones.💥
#
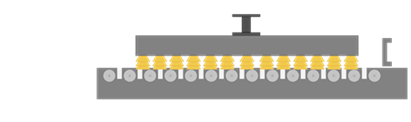
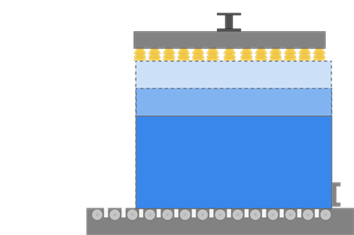
Garra de vacío
En el caso de las garras de vacío, tanto la altura de pick y la de pick invertido es dinámica, es decir, en función de la altura del producto.
El valor de pick Z y pick invertido Z serán con las ventosas pegadas al pickup.
#
Stopper Offset
Espacio de separación entre la garra y el stopper en el punto de pick. Siendo la distancia que sobresaldrá el producto con respecto a la garra. Indicado en milímetros. Este valor ajusta la referencia de dejada en el palé.
Para mas información sobre el punto de pick, consultar el nodo station, Pick Station.
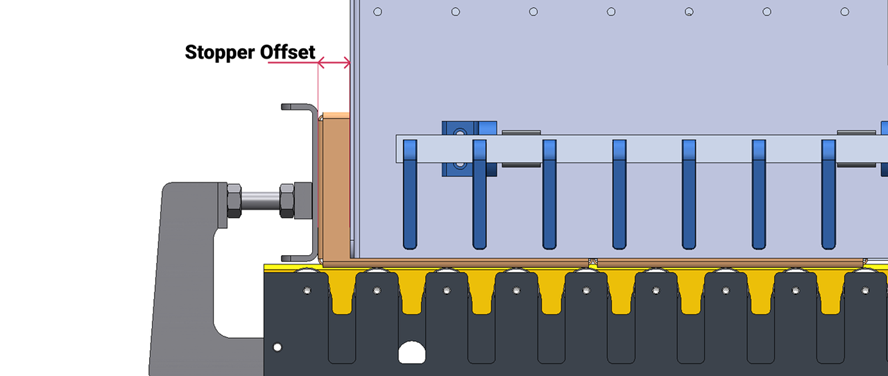
Un ajuste erróneo de este valor puede originar colisiones con los productos ya depositados sobre el palé. 💥
La modificación de este valor no modifica de ninguna forma las coordenadas de pick.
#
Inverted Stopper Offset
Espacio de separación entre la garra y el stopper en el punto de pick invertido. Siendo la distancia que sobresaldrá el producto con respecto a la garra. Indicado en milímetros. Este valor ajusta la referencia de dejada en el palé.
Para mas información sobre el punto de pick, consultar el nodo station, Pick Station.
#
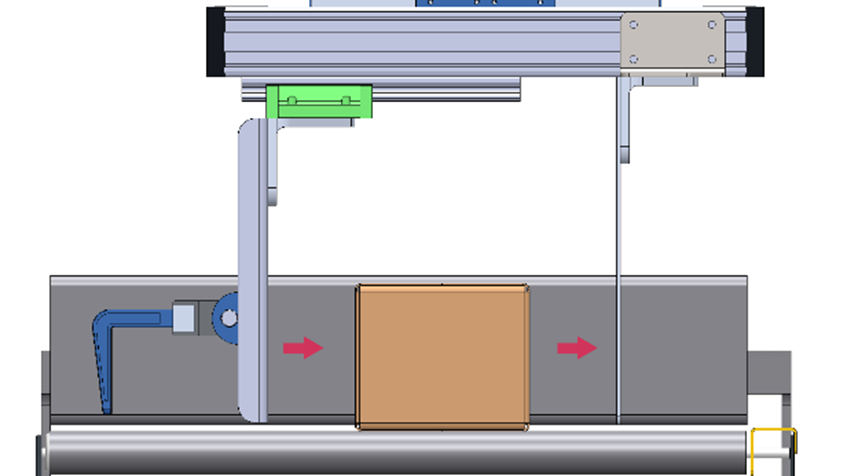
Reference side
Indicador de posición del lado en el que se encontraría la pala fija de la garra (física o virtual) en la posición de pick. Tomando como punto de vista la entrada de producto al pickup, puede estar ubicado a la derecha o a la izquierda del producto.
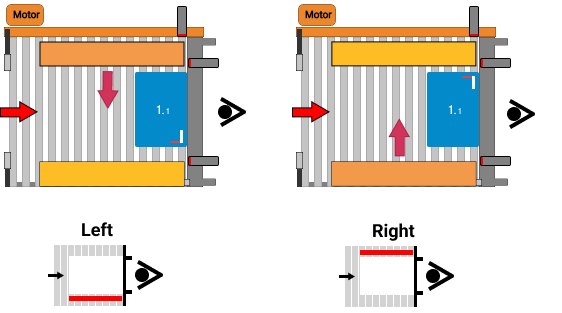
Una asignación errónea de este valor, origina un posicionamiento erróneo sobre el palé.
#
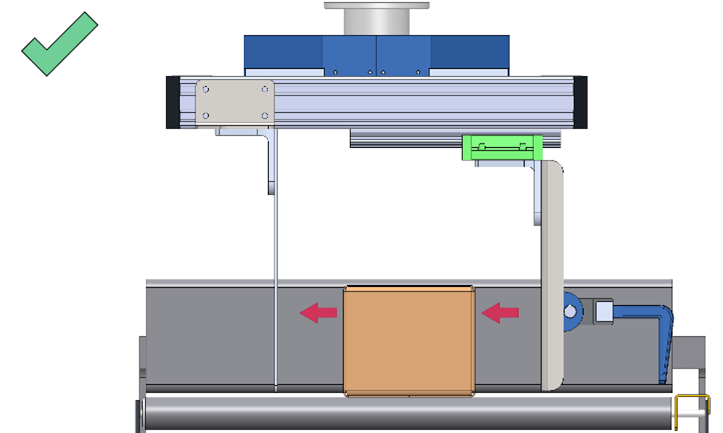
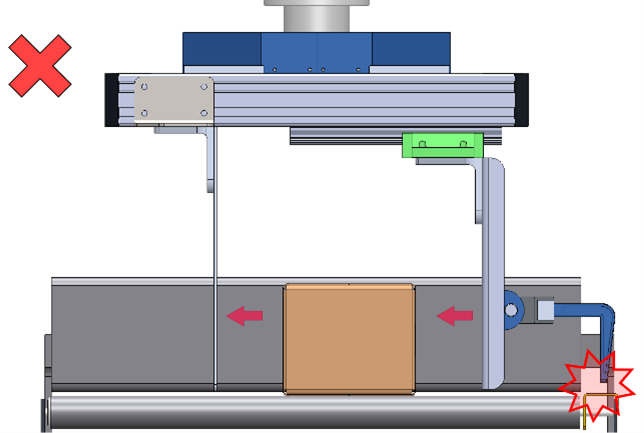
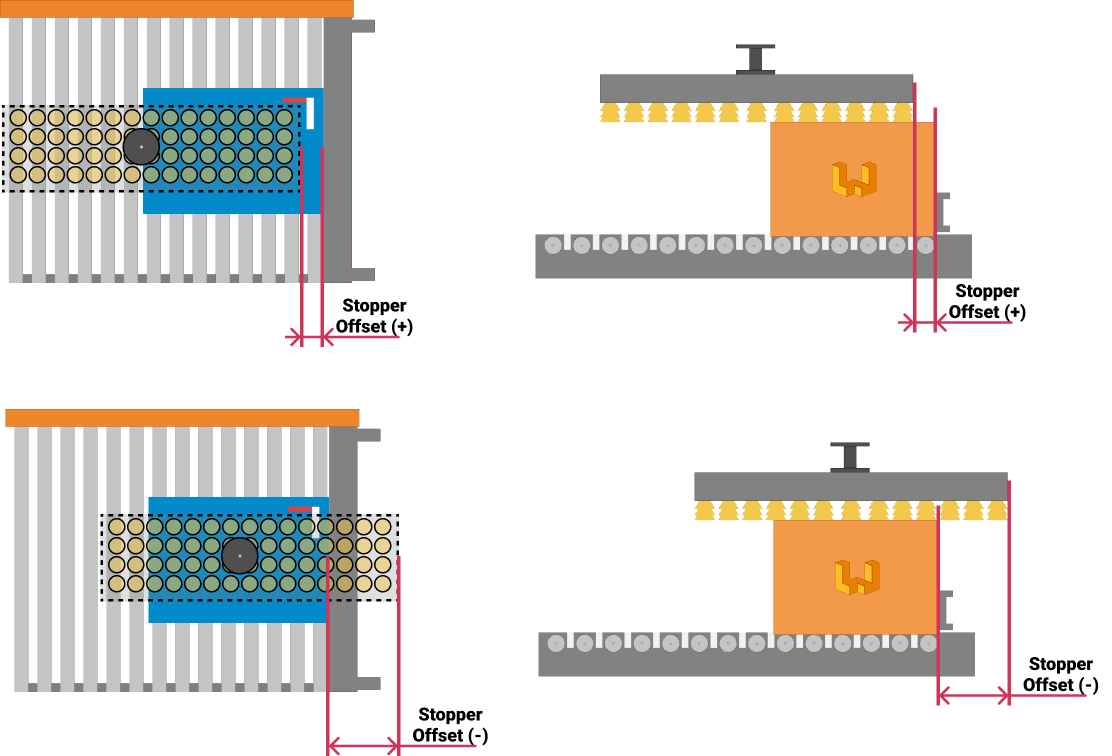
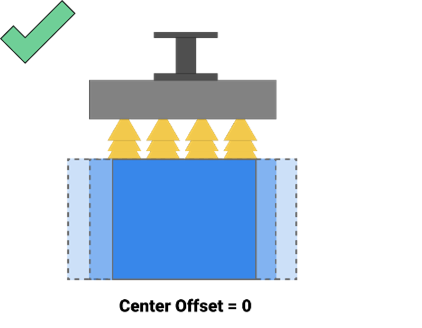
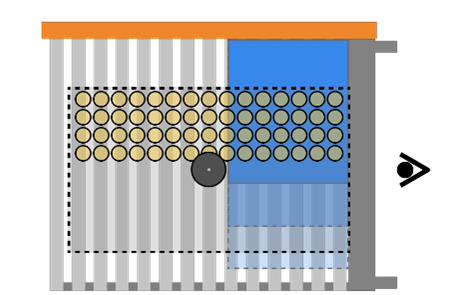
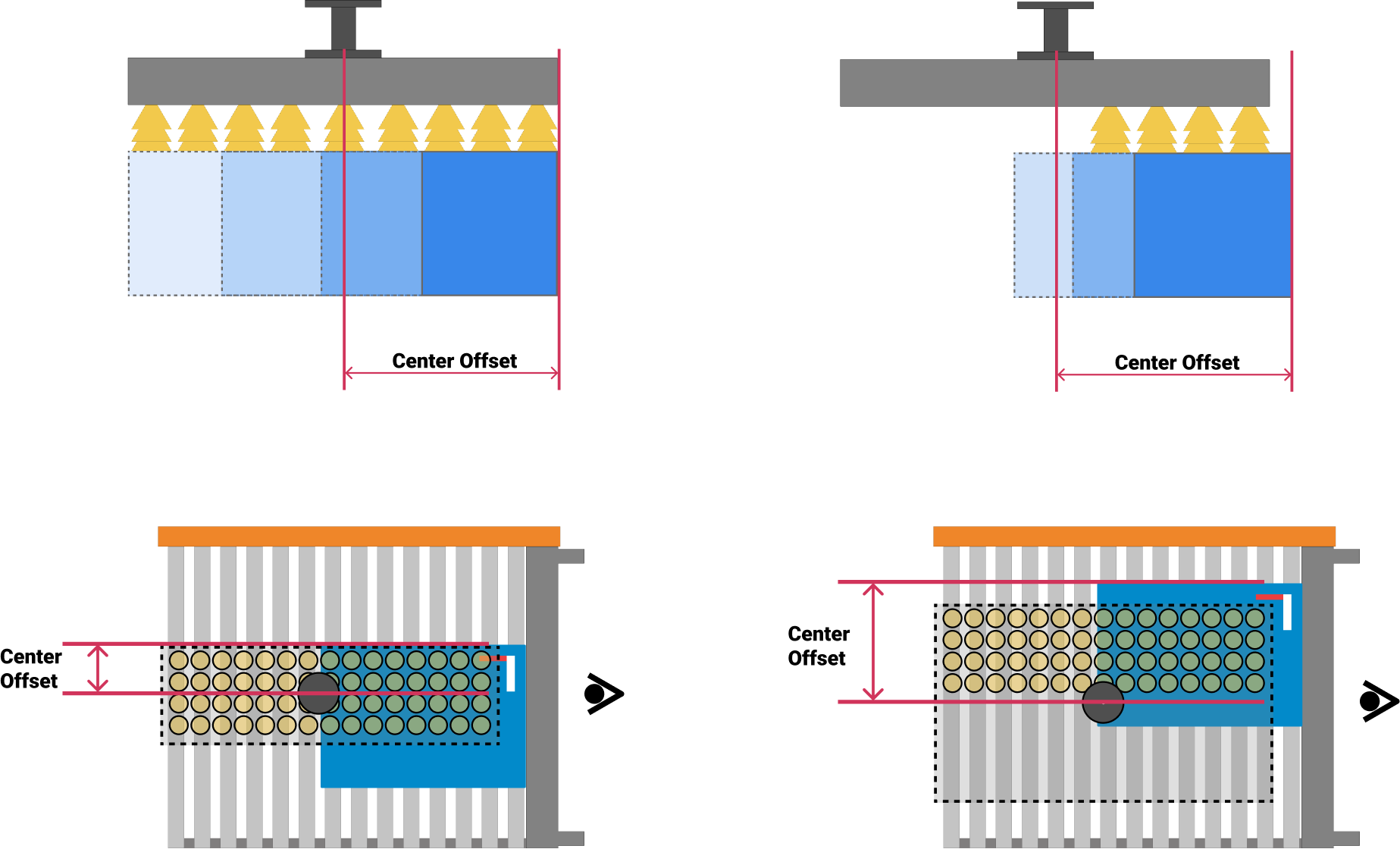
Center Offset
Distancia de separación entre el centro de la brida de unión de una garra de vacío y una referencia fija (generalmente una de las guías del pickup), en las coordenadas de pick. Indicada en milímetros.
Con un valor de 0, se le indicará al software que el producto estará siempre simétrico con respecto al centro de la brida del robot.
 |
 |
|---|
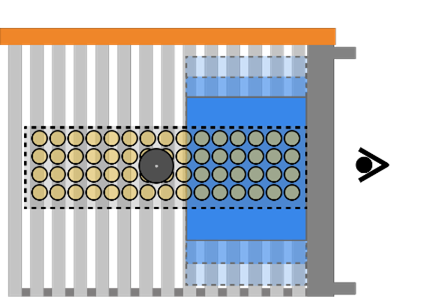
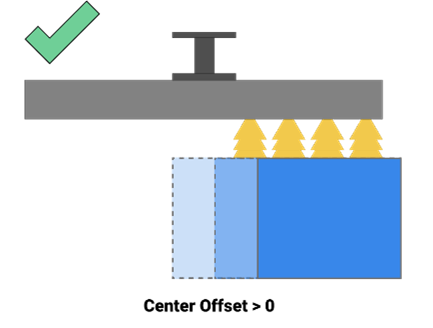
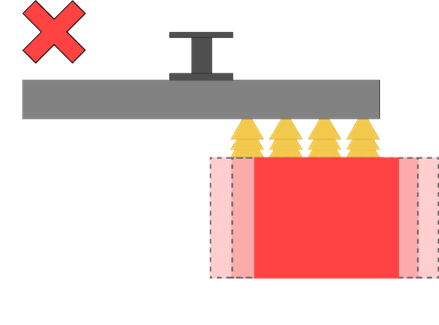
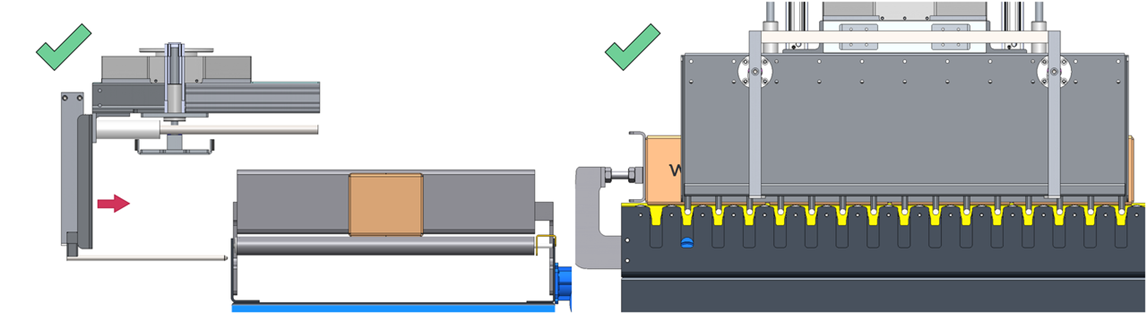
En el caso de que el sistema de succión este descentrado con respecto al centro de la brida, se deberá de disponer de un elemento mecánico que alinee los productos, de forma que se tenga una referencia fija.
 |
 |
|---|
En el caso que la brida esté descentrada y el producto no tenga una referencia fija, no está contemplada esta posibilidad dentro del software de Wepall.
A continuación, se muestran algunos ejemplos de aplicación de este parámetro.
#
Inverted Center Offset
Distancia de separación entre el centro de la brida de unión de una garra de vacío y una referencia fija (generalmente una de las guías del pickup), en las coordenadas de pick invertido. Indicada en milímetros.
Seguir las indicaciones reflejadas en el apartado center offset previo.
#
Wait [X,Y,Z,R]
Coordenadas del punto de espera de robot empleada en las garras de tenedor, hasta recibir la confirmación de producto listo en el pickup.
Para más información sobre su obtención, consultar el apartado de obtención de coordenadas de este manual.
El alineamiento de la garra tiene que ser preciso. Puesto que la aproximación de la garra la hacemos desde el lateral al pickup, y si no lo tenemos bien ajustado, los dedos del tenedor pueden colisionar al no acceder por las ranuras, o con los productos depositados en él.
#
Approx Pick
Altura a lo largo del eje Z, que elevará la garra una vez tomado el producto. Indicada en milímetros.
Dicha altura debe ser mayor que la altura del producto.
Esta altura debe permitir la entrada de producto en el pick, sin que colisione con ningún elemento mecánico de la garra, o del producto que lleve esta, así como con cualquier elemento físico presente en el pickup.
#
Overpick Offset
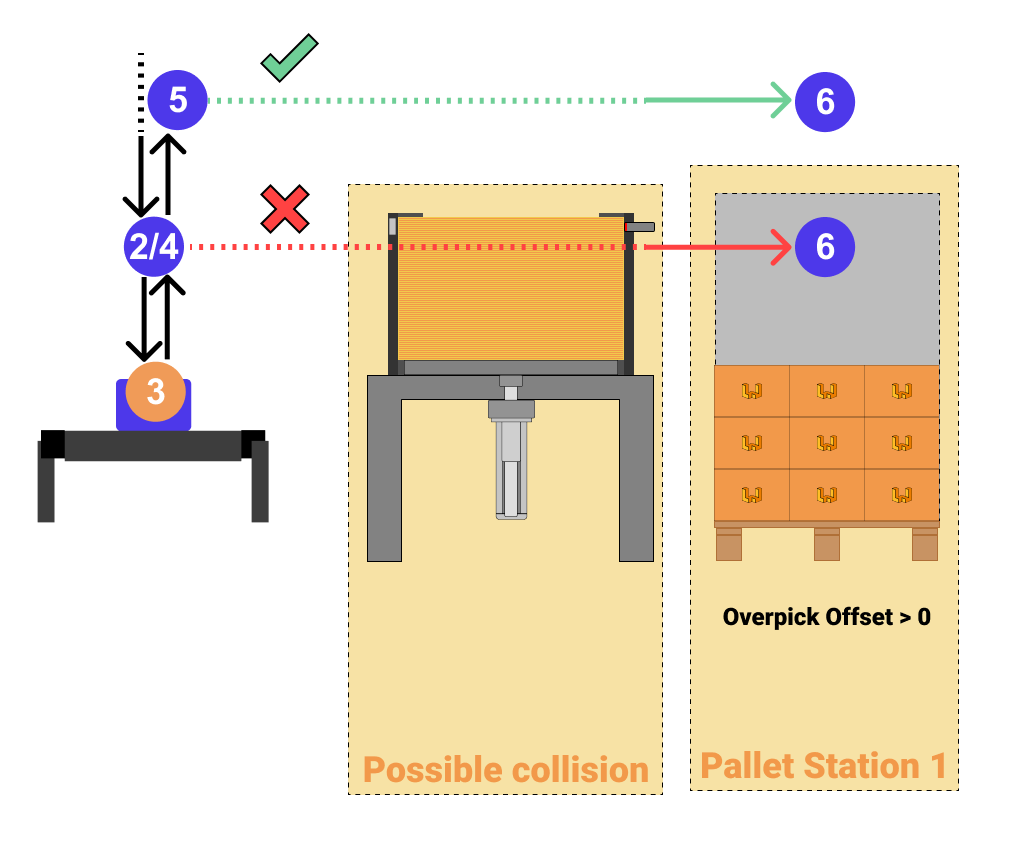
Indicará la separación mínima entre el punto 3 y el 4. Debido a que la altura del punto 4 es dinámica, si la altura de capa es superior al valor definido, se ira adaptando a una altura superior. En caso de ser inferior, tomará el valor mínimo fijado.
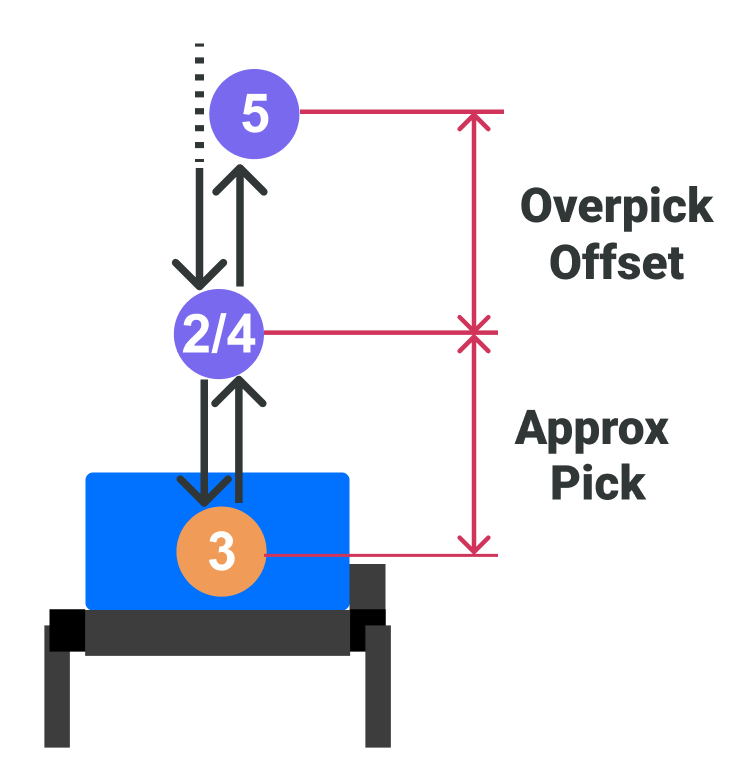
En caso de dejarse con valor 0, la altura mínima del punto 5, coincidirá con el punto 4.
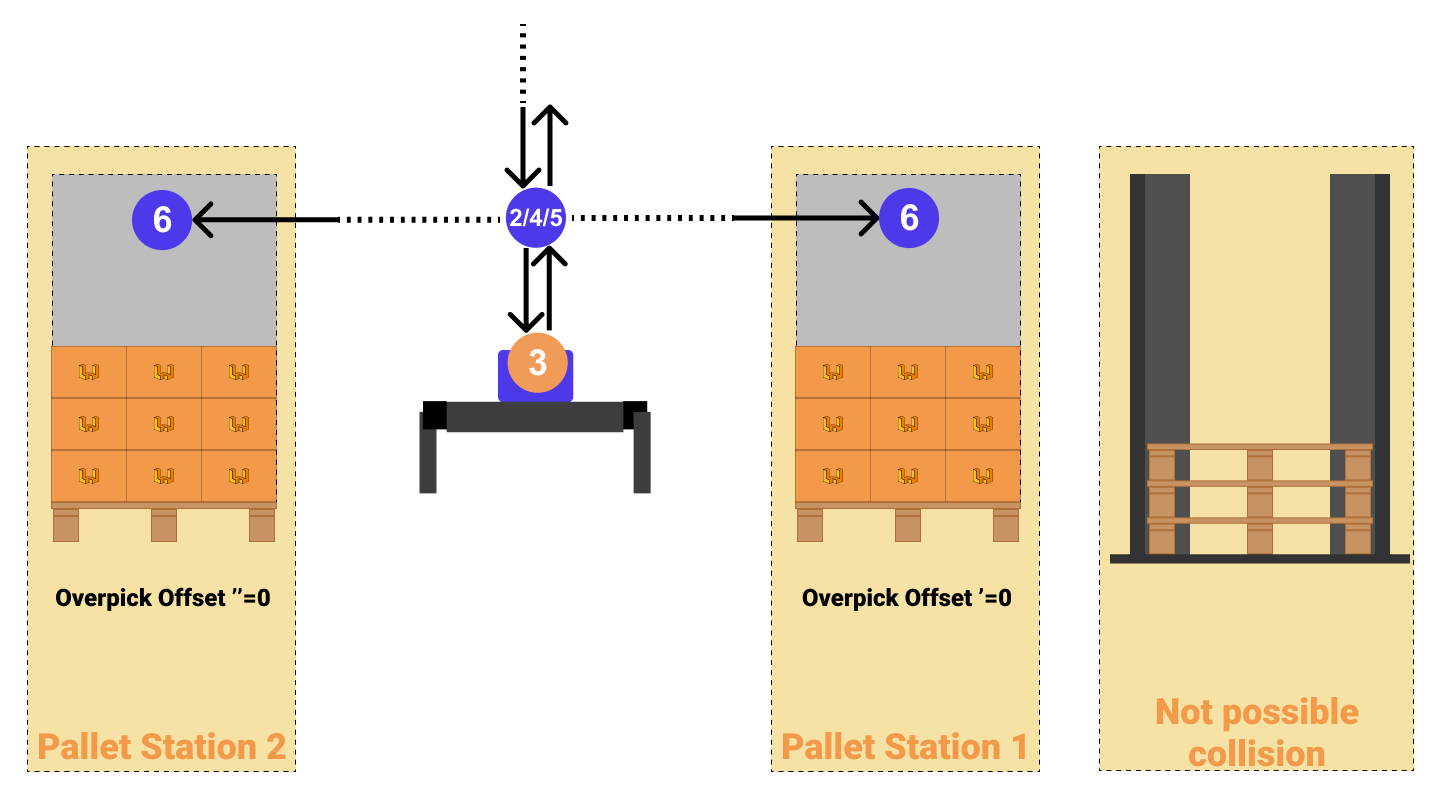
Este valor es usado para evitar obstáculos que se encuentren a una altura superior a la del punto 3, y que se encuentren en la trayectoria hacia la estación de paletizado.
Los obstáculos más habituales son: elementos mecánicos, conjuntos de fotocélulas, otras estaciones de paletizado, …
#
Variables de columna elevadora en Pick Station
Una vez habilitada la columna elevadora en el Preset Robot, estos campos aparecerán en el Preset Pick Station.
#
Lift Z
Valor de posición de la columna elevadora asociado a las coordenadas de Pick del preset Pick Station. Indicado en milímetros. Sólo disponible para robots colaborativos.
El valor Lift Z del preset Pick Station es diferentes del valor Lift Z del preset Pallet Station y al del preset Interlayer Station.
#
Inverted Lift Z
Valor de posición de la columna elevadora asociado a las coordenadas de Inverted Pick del preset Pick Station. Indicado en milímetros. Sólo disponible para robots colaborativos.