
#
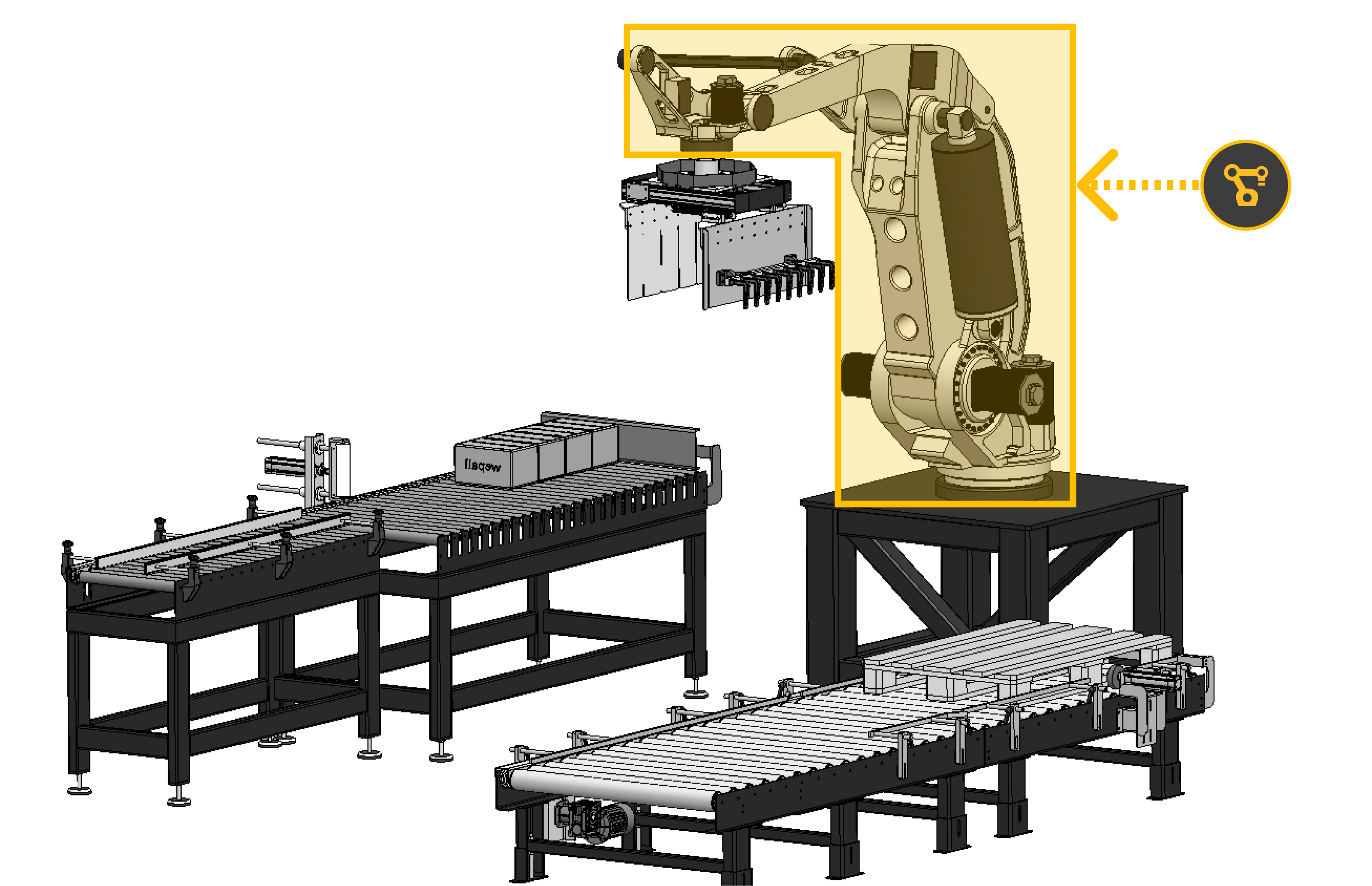
Preset Robot
#
Descripción
Este preset referencia la marca y modelo de robot vinculado al proyecto.
#
Marca y modelo
Este preset estará asociado a una marca compatible y un modelo especifico de robot, presente en nuestra base de datos.
Cuando se crea un nuevo proyecto y se accede por primera vez a una receta, se selecciona la marca y modelo entre los disponibles en la base de datos de Wepall para ese tipo de proyecto.
Una vez asignada una licencia a un proyecto, y que el estado del proyecto cambie a pagado, esta opción queda fija en el proyecto.
Para más información, consulte con el equipo técnico de Wepall.
#
Cambio de marca y modelo del robot
SOLO SE PUEDE CAMBIAR LA MARCA Y MODELO MIENTRAS QUE EL PROYECTO NO ESTE PAGADO. 🚫🗑️
El cambio solo se puede realizar entre modelos y marcas del mismo tipo de proyecto de Wepall.
Una vez asignada una licencia a un proyecto, y que el estado del proyecto cambie a pagado, esta opción queda fija en el proyecto.
Para más información, consulte con el equipo técnico de Wepall.
#
Variables
#
Name (Nombre)
Nombre definido por el usuario para el robot.
#
Model (Modelo)
Modelo de robot a implementar en el proyecto.
#
Controller version (Versión de la controladora)
Versión de la controladora.
#
Tool signal
Check para habilitar las señales de control de la garra mediante las señales directas integradas por el robot. De forma que el control lo realizaría directamente el robot, y no el PLC.
Esta función solo se encuentra integrada en algunas marcas y/o modelos concretos.
#
Only pack points
Check para generar únicamente las coordenadas de pack en los ficheros de receta, eliminando el resto de puntos de la secuencia.
Esta función solo se encuentra integrada en algunas marcas y/o modelos concretos.
#
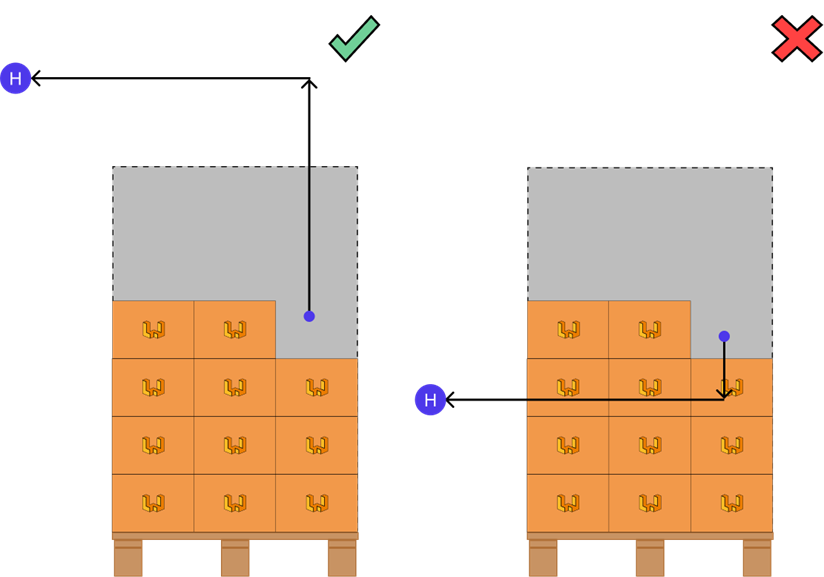
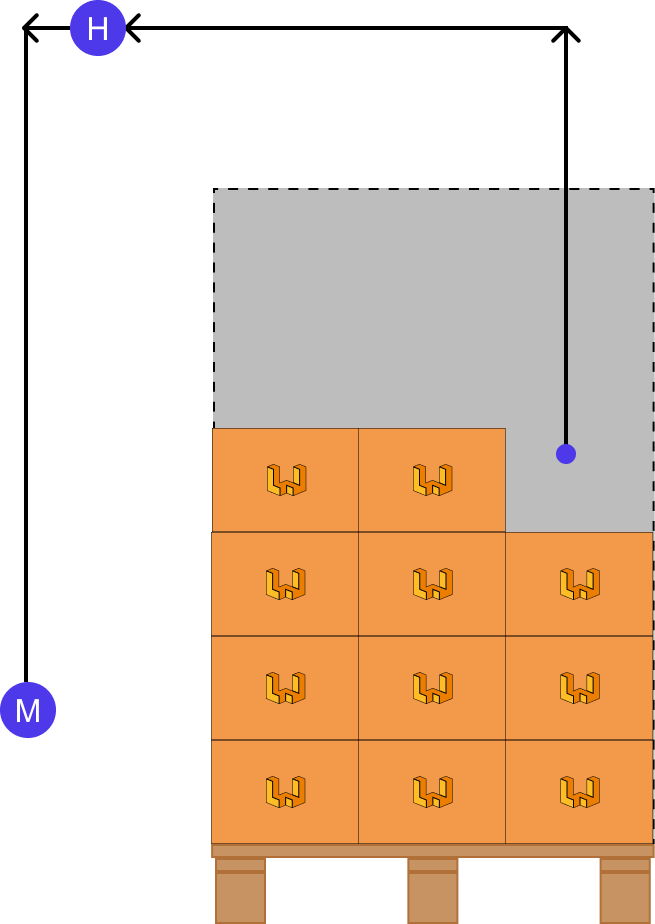
Home(X,Y,Z,R)
Coordenadas del punto Home donde el robot se ubicará en una posición segura donde no obstaculizará el funcionamiento de la instalación.
Para más información sobre su obtención, consultar el apartado de obtención de coordenadas de este manual.
#
Maintenance(X,Y,Z,R)
Coordenadas del punto de mantenimiento donde el robot se ubicará para las tareas de mantenimiento de la garra.
Para más información sobre su obtención, consultar el apartado de obtención de coordenadas de este manual.
#
Integración de columna elevadora
Advertencia
Sólo disponible para robots colaborativos
#
Has lifter
Check para habitación de columna elevadora (eje auxiliar). Sólo disponible para robots colaborativos.
Advertencia
Una vez habilitada la columna elevadora en el Preset Robot, estos campos aparecerán en los Preset:
#
Preset Robot
- Max Lift Z
- Home Lift Z
- Maintenance Lift Z
#
Preset Pick Station
- Lift Z
- Inverted Lift Z
#
Preset Pallet Station
- Lift Z
#
Preset Interlayer Station
- Lift Z
- Pack Lift Z
La NO inclusión de los valores correctos puede derivar en el mal funcionamiento de la instalación o colisiones.
#
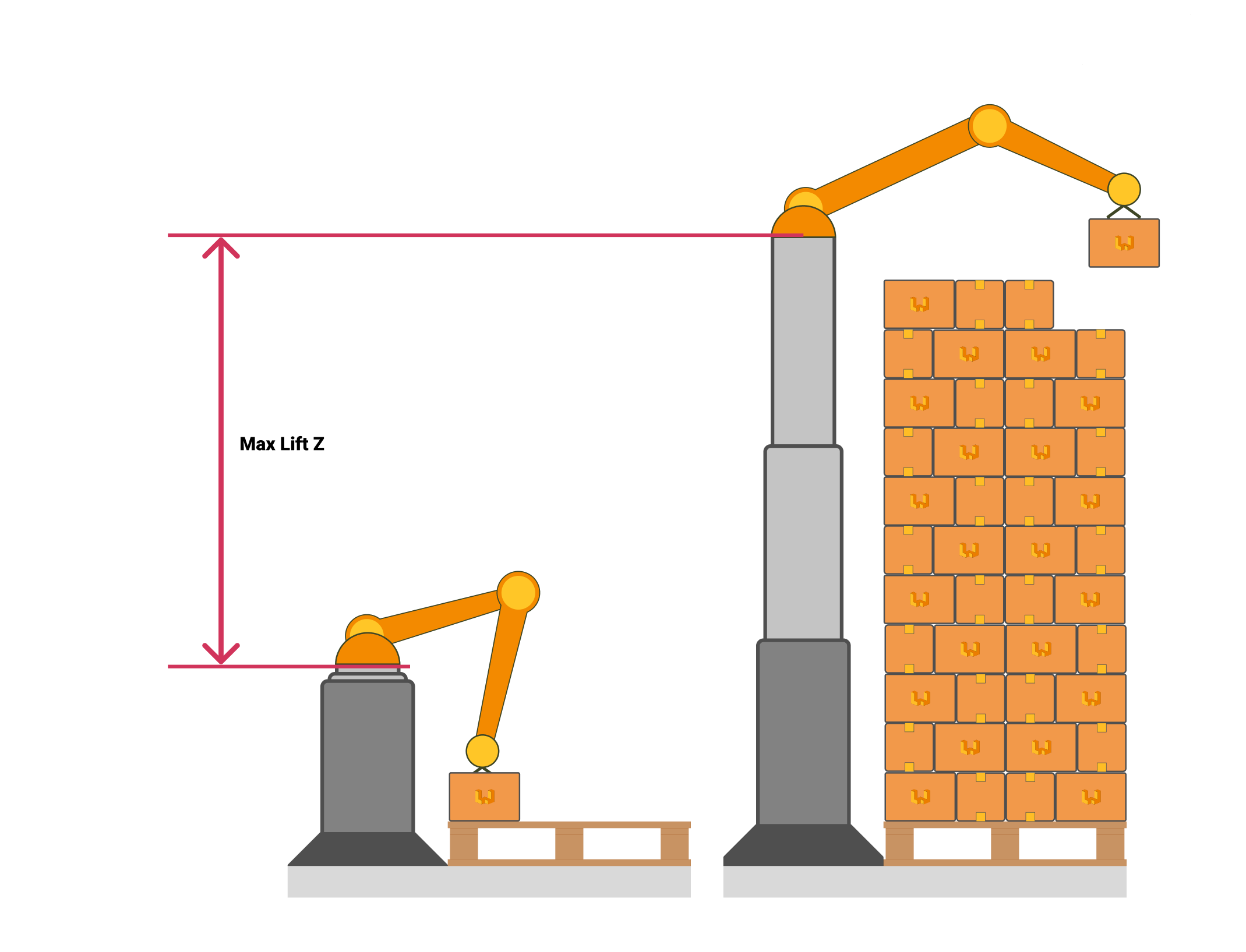
Max Lift Z
Valor de rango máximo de desplazamiento de columna elevadora. Indicada en milímetros. Sólo disponible para robots colaborativos.
#
Home Lift Z
Valor de posición de la columna elevadora asociado a las coordenadas de Home del preset robot. Indicado en milímetros. Sólo disponible para robots colaborativos.
#
Maintenance Lift Z
Valor de posición de la columna elevadora asociado a las coordenadas de mantenimiento (maintenance) del preset robot. Indicado en milímetros. Sólo disponible para robots colaborativos.
#
Lifter
Tipos de gestión de columna elevadora. Pudiendo ser gestionada directamente por el PLC (mediante canal de comunicación) o directamente por el robot (solo marcas soportadas).
Para más información, consultar la sección de interacción PLC- Robot de este manual.